
工业机器人产业链可以分为上中下游:
上游是关键零部件生产厂商,主要是减速器、控制系统和伺服系统;中游是机器人本体,即机座和执行机构,包括手臂、腕部等,部分机器人本体还包括行走结构,是机器人的机械传统和支撑基础。按照结构形式,本体可以划分为直角坐标、球坐标、圆柱坐标、关节坐标等类型;下游是系统集成商,根据不同的应用场景和用途进行有针对性地系统集成和软件二次开发,国内企业都集中在这个环节上。生产出来的机器人只有通过系统集成之后,才能投入到下游的汽车、电子、金属加工等产业,为终端客户所用。

整体来看,工业机器人的总成本中,核心零部件的比例接近70%,其中减速器、伺服电机和控制器占比分别为32%、22%和12%。

工业机器人核心零部件及本体成本占比

中国工业机器人减速器市场格局

中国工业机器人伺服系统市场格局

中国工业机器人控制系统市场格局

2017 年中国工业机器人市场格局





核心零部件技术是机器人本体企业的核心竞争力
1.减速器:工业机器人不可或缺的明珠

(1) 技术分析:RV 与谐波减速器占据主流地位
伺服电机由于脉动信号的驱动,本身具备调速功能,那么机器人为何需要减速器?
由于工业机器人需要重复、可靠地完成大量工序任务,对其定位精度和重复定位精度要求很高,因此需要专门的减速器以保证精度。减速器的另一作用是传递负载:当负载较大时,伺服电机功率有限导致输出扭矩较小,此时需要通过减速器来提高扭矩。此外,伺服电机在低频运转下容易发热和出现低频振动,对于长时间和周期性工作的机器人这都不利于确保其精确、可靠地运行。
精密减速器的存在使伺服电机在一个合适的速度下运转,并精确地将转速降到机器人各部位需要的速度,提高机械体刚性的同时输出更大的力矩。与通用减速器相比,机器人关节减速器要求具有传动链短、体积小、功率大、质量轻和易于控制等特点。
工业机器人用精密减速机主要分为5类,不同类型的精密减速机在传动效率、减速比方面各不相同。衡量精密减速机的主要指标包括:扭转刚度、传动精度、启动转矩、空程、背隙、传动误差、传动效率等。

目前,大量应用于多关节机器人的减速器主要有两种:RV减速器和谐波减速器。相比于谐波减速器,RV减速器具有更高的刚度和回转精度。因此在关节型机器人中,一般将RV减速器放置在机座、大臂、肩部等重负载的位置;而将谐波减速器放置在小臂、腕部或手部;二者之间适用的场景不同,属于相辅相成的关系。而行星减速器一般用在直角坐标机器人上。
RV(Rotary Vector)减速器
在摆线针轮行星传动的基础上发展而来,结构主要分为两级:第一级为渐开线圆柱齿轮传动,第二级为摆线针轮行星传动,包括转臂曲柄、摆线轮、针齿壳,特点在于承受大负载的同时保证高精度。因此,其技术难点主要在于工艺和装配方面:1.材料成型技术。RV减速齿轮需要具有耐磨性和高刚性,对于材料成型过程提出了较高要求,尤其是材料化学元素控制、表面热处理方面。2.精密加工及装配技术。RV减速器的减速比较高,具备无侧隙、微进给的特点,这就需要特殊部件加工和精密装配技术。

RV减速器结构拆分
工作原理:1.第一减速部:伺服电机的旋转从输入齿轮传递至正齿轮,按二者的齿数比进行减速;曲轴直接与正齿轮相连,以相同的转速旋转。2.曲轴部:曲轴旋转,带动偏心部的RV齿轮进行偏心运动。3.第二减速部:另一方面,针齿数目比RV齿轮的齿数多1个;如果曲轴旋转1圈,RV齿轮与针齿接触的同时进行1圈的偏心运动,使得RV齿轮沿着相反方向旋转1个齿数的距离,并通过曲轴传递至输出轴,实现减速。而总体减速比为第一、第二减速部的减速比之积。

RV减速器工作原理
谐波减速器
基于行星齿轮传动发展起来,由波发生器、柔轮、刚轮和轴承组成。其工作原理在于依靠波发生器使柔轮产生可控弹性变形,而柔轮比钢轮少N个齿轮位。因此,当波发生器转一圈,柔轮移动N个齿轮位,产生了所谓的错齿运动,从而实现了主动波发生器与柔轮的运动传递。谐波减速器是通过柔轮的弹性变形来实现传动,其优势是传动比大、零部件数目少;其缺点是弹性变形回差大,这就不可避免地会影响机器人的动态特性抗冲击能力等。

谐波减速器结构拆分
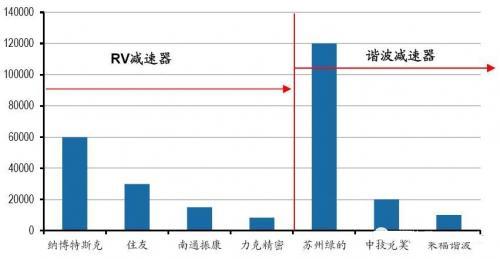
从国内外产品技术指标来看,国外产品信息相对完善,每种规格对应的各技术指标都有精确的数值呈现。而国内在这方面略显欠缺,表明国内企业在检测能力方面的不足,缺少严格的质量管理体系。目前,国产减速器还存在两方面的问题:1.产品系列不健全。日本纳博具备全系列产品,基本上可以应用于所有领域。根据纳博官网的披露,其RV-N系列产品还处于专利保护期,而国内产品系列相对残缺;2.一致性问题。国产减速器在实际使用环境下的性能,与实验室性能无法完全匹配,个别产品存在漏油、精度降低等情况,是阻碍国产减速器进军高端市场的原因之一。
从RV减速器的技术指标来看,对比纳博RV-E系列和南通振康的产品,可以看到在同一输出转速和输入功率下,二者的输出扭矩范围相当,说明国内产品在传动效率上已经可以与国外媲美。然而工艺水平是限制RV减速器发展的主要原因,例如非标特殊轴承是RV减速器的精密机构,其间隙需根据零部件加工尺寸动态调整。为了结构紧凑,薄壁角接触球轴承精度要求较高,加预紧力后轴承的游隙为零。因此,今后需要在传动精度、扭转刚度等方面加强研究。
从谐波减速器的技术指标来看,国内的苏州绿的和中技克美的减速比范围与日本哈默纳科水平相当,产品性能基本满足要求,目前已经大量应用于国产机器人。而国外产品在输出扭矩、平均寿命和一致性等技术指标上依然占据优势。

(2)国产化进程:国内企业订单频传,加速进口替代
国产企业布局积极,有望率先突破。减速器是制约降低国产工业机器人成本最重要的因素,尽管目前国产工业机器人减速器研发困难重重,但是整体产品的质量在逐步提高,在一些核心指标上已经达到国际水平,其高性价比已经得到了部分国内企业的认可,例如新松机器人、埃夫特等企业均开始使用南通振康的RV减速机产品。目前国内公司已经开始积极布局精密减速机业务,主要上市公司包括双环传动、秦川机床、上海机电和巨轮股份等,非上市公司包括南通振康、中技克美、北京谐波等。
国内企业减速机业务推进顺利,订单频传。2017年以来,减速器国产化进程显著加快,根据中大力德公告的披露,公司将于2019年底之前向伯朗特供货RV减速器不低于30000套;根据公告的披露,埃夫特将采购双环传动的RV减速器一万套;根据公司官网的披露,南通振康将分别向上海欢颜、埃夫特批量提供减速器。根据上海机电年报的数据,旗下的纳博精机于2015年10月投产,目前已经达到10万台产能,并于2017年5月开始实现单月盈利,目标早日达到20万台的产能。除此之外,中技克美成为国内第一家上市的谐波减速器企业,产能2万套,其中50%-60%用于军工领域。秦川机床、中大力德、来福谐波也分别开发了系列产品,进入量产阶段。
2017年中国大陆地区减速器出货量统计(台)
(3)需求测算:未来减速器业务有多大的空间?
减速器市场测算逻辑:根据IFR的预测,按照类型划分未来工业机器人需求量,进一步按每种类型的机器人所需的RV和谐波减速器数量,来预测总体市场需求和空间。
2016年中国机器人销量已接近全球市场份额的30%,连续四年成为全球最大的工业机器人市场。根据国际机器人产业协会IFR的预测,未来几年中国机器人行业销量有望维持25%-30%左右的增速。我们以IFR预测下限25%的增速,以2017年14万台为基数进行测算。到2020年,我国工作机器人销量有望达到27万台。
另外,根据MIR公布的2017年中国工业机器人市场份额,按类型来划分,六轴多关节机器人、SCARA机器人、关节型手臂、协作机器人和DELTA机器人的占比分别为67.8%、21.2%、6.05%、2.89%、2.05%。我们按照各种类型工业机器人所需减速器类型和数量进行划分。一般情况下,六轴多关节机器人需要4套RV减速器和2套谐波减速器;SCARA机器人包含4个谐波减速器;关节型手臂和协作机器人类型较多,我们按照4轴多关节机器人计算,大约每套需要3个RV减速器和1个谐波减速器;而DELTA机器人的电机安装在固定基座上,我们按照其需要1个谐波减速器计算。
由此,我们可以得出以下减速器需求量测算公式:
RV减速器数量=六轴多关节机器人*4+(关节型手臂+
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 基于AD9516的宽带高动态数字中频系统采样时钟设计与应用
基于AD9516的宽带高动态数字中频系统采样时钟设计与应用







 APP下载
APP下载 登录
登录







