×


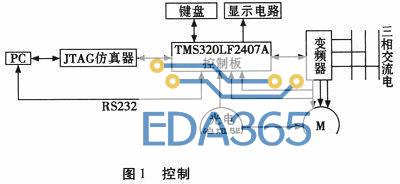
图1是一个双闭环调速系统,主要由转子磁极位置检测及速度检测模块、坐标变换模块、位置速度电流控制器、SPWM模块、整流和逆变模块等组成。[page]
控制过程为:给定速度信号ω*与通过位置传感器检测计算得到的速度信号ω比较,经速度控制器调节,输出指令信号,作为q轴电流控制器给定信号;d轴电流控制器的给定信号为0。电流采样得到的三相定子电流ia、ib、ic,通过Clark坐标变换化为αβ坐标系两相电流iα和iβ,再通过Park坐标变换后得到d-q旋转坐标系下电流值id、iq,分别作为d轴和q轴电流调节器的反馈输入,通过比较元件得到两者的偏差,分别输入到d轴和q轴的电流控制器,经调节后输出电压ud、uq,再经过Park坐标逆变换和Clark坐标系逆变换得到ua、ub、uc,经SPWM模块输出六路PWM,驱动IGBT产生频率和幅值可变的三相正弦电压输入永磁同步电机。
3 仿真模型的建立
Matlab下的Simulink和Simpower Systems包括各种功能模块,容易实现永磁同步电机矢量控制系统的仿真建模,直观而且无需编程,使系统设计从方案论证到硬件设计更为便捷,大大缩短了系统设计的时间。在Matlab7.0的Simulink环境下,搭建了采用id=0的矢量控制双闭环系统仿真模型。PMSM系统建模仿真的整体结构包括PMSM本体和三相电压型逆变器模块(Simulink的Simpower Systems库中已提供)、坐标变换模块以及SPWM生成模块,按照转子磁场定向原理搭建的PMSM控制系统仿真模型如图2所示。
4 仿真结果及其分析
根据所建立的永磁同步电机矢量控制的仿真模型,在Matlab7.0/Simulink环境下运行,采用的力矩电机参数如下:直流侧电压Udc= 200 V,定子绕组电阻Rs=0.85 Ω,d轴电感Ld=3.3 mH,q轴电感Lq=3.3 mH,电机磁链λ=0.068 Wb,转动惯量J=0.8×10-3kg·m2,极对数p=12。
设定仿真总时间t=0.4 s,负载转矩为5 N·m,初始速度为200 rad/s,在t=0.2 s时的速度将变为400 rad/s。调节PI参数,得到电机的相电流、角速度、电角度、转矩等波形如图3所示。
5 结论
设计出一种基于Simulink工具箱的PMSM矢量控制系统仿真建模,采用双闭环调速方法,通过仿真结果可以看出系统能平稳运行,具有良好的静、动态特性,可达到与直流电机近似的控制效果。采用该PMSM仿真模型可以便捷地实现、验证id=0控制算法,同时也为实际PMSM系统的设计和调试提供了有效途径。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 新制导炸弹智能控制系统的研究
新制导炸弹智能控制系统的研究








 APP下载
APP下载 登录
登录







