×


车载以太网的发展速度比较惊人,自从BMW在2008年在第一个车型上搭载以太网的,10年以来很多车企都在入局。
在2013年得以实现,BMW牵头创建了一对非屏蔽双绞线的以太网物理层(IEEE 100base-T1),这里也是透过一些车型平台来看这个以太网的实际部署速度快速从局部网络阶段、子网络阶段,开始往多子网络阶段走。

2008-2013年:局部网络阶段,单独在某个子系统上应用车载以太网技术,实现子系统功能,如基于 DoIP 协议的 OBD 诊断、使用 IP 协议的摄像头等;
2015-2018年:子网络阶段,开始将某娱乐、安全和通信子系统进行整合,构建车载以太网子系统,实系统的功能;

1)2008-2013
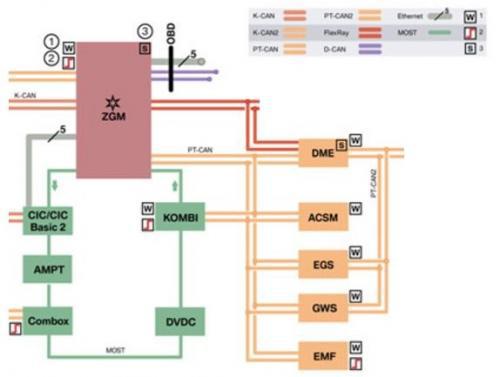
2)2015,这个是从G01的X3开始的
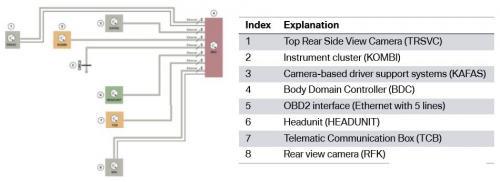
The following ECU are connected to the vehicle electrical system via two-wire OABR Ethernet
Active Cruise Control (ACC)
Camera-based driver support systems (KAFAS)
Top Rear Side View Camera (TRSVC)
Rear view camera (RFK)
The following ECU are additionally connected via two-wire OABR Ethernet
Head unit
Optional equipment system (SAS)
Telematic Communication Box
Ethernet topology without Ethernet switch on vehicles with Headunit Basic
Ethernet topology with Ethernet switch on vehicles with Headunit Basic

Ethernet topology on vehicles with Headunit High
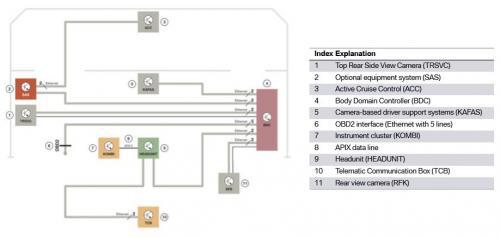
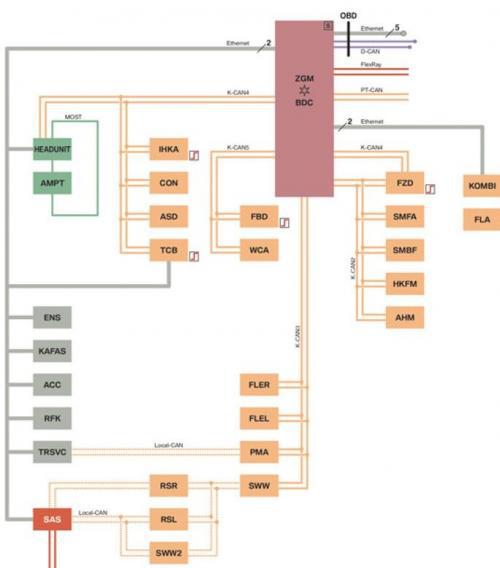
3)2018年的G15的8系
从G15的主体的连接对之前的G01,差异其实挺大的,开关模块没有了

The following control units are connected to the vehicle electrical system via OABR Ethernet:
• Driver Camera System (DCS)
• Top Rear Side View Camera (TRSVC)
• Rear view camera (RFK)
• Camera-based driver support systems (KAFAS)
• Front radar sensor long range (FRSF).
The following control units are, aside from a further bus system, connected to the vehicle electrical system via OABR Ethernet:
• Head Unit High (HU-H)
• Telematic Communication Box (TCB)
• Receiver Audio Module (RAM)
• Optional equipment system (SAS).

小结:从一个个车型的迭代和变化来看,以太网的渗入速度好快,也就是说之前说的SOA随着物理层部署完毕,在娱乐和ADAS这块会带动整个车辆的速度量的传输过程,也就助推了软件开发模式和域控制器的导入。我们站在EV的角度来看,软件这块是存在延迟的
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 动力电池管理系统硬件设计技术
动力电池管理系统硬件设计技术








 APP下载
APP下载 登录
登录







