
工业机器人现在被广泛使用,并且在汽车制造和某些特殊领域中还是必不可少的。传统的机器人手适合于抓住有固定形状的硬物,对于具有复杂形状或柔软的物体,是较难抓住或用轻柔的方式实现抓握的。对于机器手指,还需要能适应各种物体表面特性,比如干燥或潮湿的。
具有柔软表面的机器人手指其指尖是可以变化的,因此可以容易的抓住复杂形状的物体,因为其手指接触区域可以根据所抓取物体形状的表面而变大。这种机器手指在抓取柔软物体方面非常有效; 甚至可以把豆腐抓住。然而,通常,柔软材料的表面摩擦系数很高,就使得释放比较困难,将物体释放到指定的位置也是非常困难的,尤其是在工作空间非常狭窄的情况下。
由金泽大学Tetsuyou Watanabe教授领导的小组一直在研究用机器人手指抓取物体的控制技术。在本研究中,该小组旨在开发一种摩擦控制系统。该小组使用机器人手的柔软指尖抓取物体,然后通过注入润滑剂完成释放。在该研究中,使用无水乙醇(> 99.5%)作为润滑剂,因为乙醇在化学上是安全的并且易于干燥,并且其表面张力低。
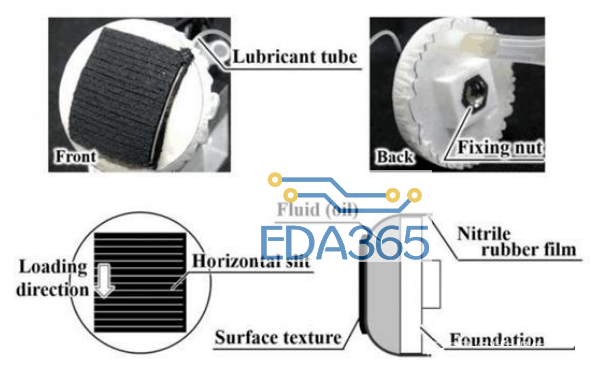
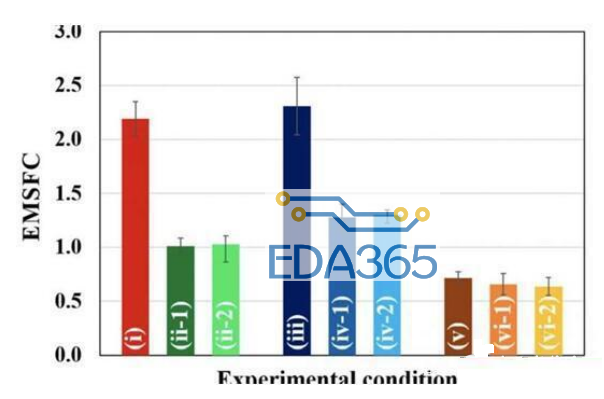
如上图所示,将丁腈橡胶薄膜粘合到指尖的侧面,以形成填充润滑剂的空间,从而形成“ 流体指尖”。然后粘合硅树脂以涂覆橡胶膜,硅树脂的材料是带有狭缝的硅酮密封胶,其间隔为1.5mm,垂直于负荷方向。在湿条件下引入狭缝可以获得更大的摩擦并且使润滑剂扩散。使用这种流体指尖,可以抓住厨房里各种材料的物体,并且证实在施加润滑剂时,摩擦力确实会减小(见下图)。在干燥和潮湿的条件下,摩擦力都会降低。
随后,研究人员用包装纸盒进行了模拟测试,如下图所示。从两侧用两个流体指尖抓住纸盒。将上述硅树脂粘合到每个流体指尖。通过在纸箱上放置重物来确认抓握是否牢固。除去重物后,将润滑剂注入两个流体指尖,这导致纸箱在相当短的时间内(小于2.5秒)向下滑动,从而完成纸箱包装任务。这说明,高摩擦的硅树脂粘合到流体指尖,并且注入润滑剂(这里用的是无水乙醇)减少了摩擦。因此,通过在不移动指尖的情况下控制摩擦来实现将物体释放和放置在指定位置。
在该研究中,证实了通过注入适当的润滑剂可以控制具有高摩擦力的软表面流体指尖的物体抓取。当时,进行更多条件下的实验也是有必要的,以便将该技术应用于制造场景中。尽管如此,这项研究也是实现工作自动化的一个进步,例如,在狭窄空间中抓取和释放物体。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 一种利用模糊PID算法的婴儿培养箱温度控制系统设计剖析
一种利用模糊PID算法的婴儿培养箱温度控制系统设计剖析






 APP下载
APP下载 登录
登录







