
一、额定电压(电流)驱动:参见前文《步进电机的静态转矩特性及测量方法》一文的下图,从额定电压降低电压来驱动步进电机,发现位置定位精度变差。
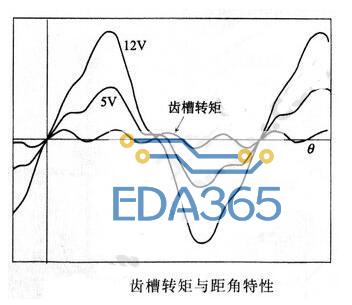
例如:在空载时,用编码器作为负载,在额定电压(电流)时的精度与低于额定电压(电流)比较,精度变化较大。如上图所示,齿槽转矩使特性畸变的程度依据所加电压而不同,电压越低,齿槽转矩影响越明显。作者经验认为角度精度太差是很麻烦的,会引起测量电压(电流)不准。大家会注意到,转矩与电压有一定关系,而此关系如不同,会使空载时的角度精度变得很差或成为盲点。
二、2相激磁驱动:1相激磁驱动定子齿与转子齿作位置定位。相对2相激磁,由定子的2个相绕组激磁,转子齿磁场与定子磁场平衡,作位置定位。因1相激磁驱动时,其误差精度为各定子相的本身机械精度,而2相激磁误差,由多极位置决定,误差有所缓解,精度变好。特别是纵列型的两相PM型步进电机,1相激磁与2相激磁比较,1相激磁精度会差一些。
三、多步进位置定位:两相步进电机时以2或4步进位置定位驱动;三相步进电机3或6步进位置定位驱动。《步进电机步距角度精度的测量》一文中提到的是两相HB型步进电机的例子,如每4步进位置定位,精度大幅提高。
例如,每1.8°位置定位时,1.8°并非使用全步进,而是使用0.9°的步进电机,以2步进驱动1.8°位置定位,全步进选择0.6°的步进电机,3步进驱动有0.6°×3=1.8°的驱动方式。此种方式可以大大提高精度。其原因见《电机选择:步进电机位置定位精度的选用》一文。
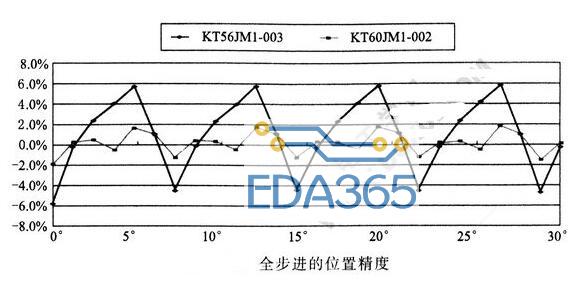
微调定子结构的改善:已知定子的微调结构能改善位置定位精度。以两相电机为例,微调结构,可以降低齿槽转矩,距角特性变为正弦波。三相HB型1.2°的步进电机,六主极无微调,与12主极有微调的全步进驱动时的位置精度比较如下图所示:
1/8细分驱动时的位置定位精度比较如下图所示:
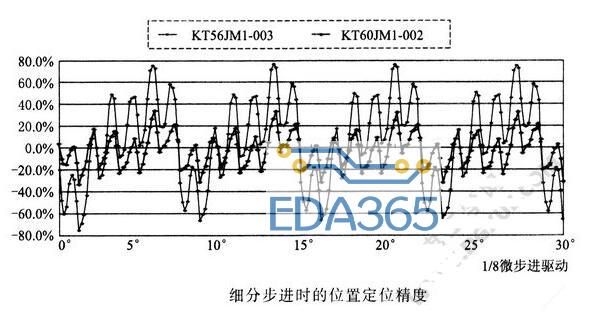
三相12主极微调结构步进电机全步进时,位置定位精度可以改善±2%以内。在细分时,微调结构精度提高近50%。细分步距角精度比全步距角运行的精度大。步距采用8分割时,步距角为1.2°/8=0.15°,以此作为控制计算基准,其精度值当然比全步距角时要高。
三相HB型高分辨率电机的改善:参见《电机选择:步进电机位置定位精度的选用》的详细说明。三相HB型步进电机有2相1.8°的1/3,即0.6°的髙分辨率电机,由于驱动芯片可以在市场上买到,所以可以很容易地实现高精度位置定位。
RM型细分时的改善:以HB型步进电机细分的角度,用于位置定位时,其精度会有问题。RM型10细分位置定位时,计算出的位置是线性变化的。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 机器人控制电路设计
机器人控制电路设计







 APP下载
APP下载 登录
登录







