×


电机,存在于我们生活中的方方面面。小到玩具车几毛钱成本的小马达,大到汽车高铁上百马力甚至轮船航母上万马力的电动机。电机可以起到电能和机械能相互转化的作用,发电机和电动机均被称作电机。除了太阳能电站和电池外,剩下的发电设施都要用到电机。泵的工作,机械臂运动,风扇转动和机床工作等等,消耗掉了发电站发出来的绝大部分的电能。
首先,单片机可以输出直流信号,但是它的驱动能力也是有限的,所以单片机一般做驱动信号,驱动大的功率管如Mos管(LR7843),来产生大电流从而驱动电机,且占空比大小可以通过驱动芯片控制加在电机上的平均电压达到转速调节的目的。
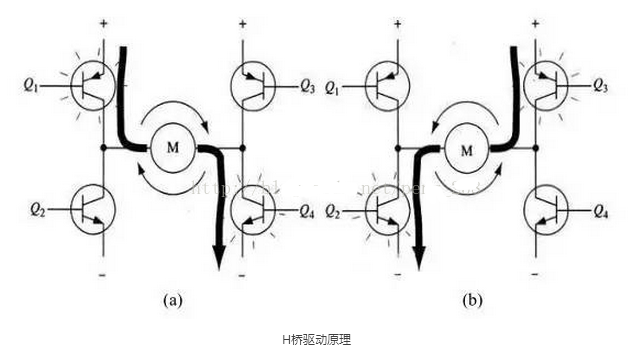
电机驱动主要采用N沟道MOSFET构建H桥驱动电路,H 桥是一个典型的直流电机控制电路,因为它的电路形状酷似字母 H,故得名曰“H 桥”。4个开关组成 H 的 4 条垂直腿,而电机就是H中的横杠。要使电机运转,必须使对角线上的一对开关导通,通过不同的电流方向来控制电机正反转,其连通电路如图所示。
实际驱动电路中通常要用硬件电路方便地控制开关,电机驱动板主要采用两种驱动芯片,一种是全桥驱动HIP4082,一种是半桥驱动IR2104,半桥电路是两个MOS管组成的振荡,全桥电路是四个MOS管组成的振荡。其中,IR2104型半桥驱动芯片可以驱动高端和低端两个N沟道MOSFET,能提供较大的栅极驱动电流,并具有硬件死区、硬件防同臂导通等功能。使用两片IR2104型半桥驱动芯片可以组成完整的直流电机H桥式驱动电路,而且IR2104价格低廉,功能完善,输出功率相对HIP4082较低,此方案采用较多。
另外,由于驱动电路可能会产生较大的回灌电流,为防止对单片机产生影响,最好用隔离芯片隔离,隔离芯片选取有很多方式,如74lvc245、74hc244、PS2801等,这些芯片常做控制总线驱动器,作用是提高驱动能力,满足一定条件后,输出与输入相同,可进行数据单向传输,即单片机信号可以到驱动芯片,反过来不行。
1.选择控制对象
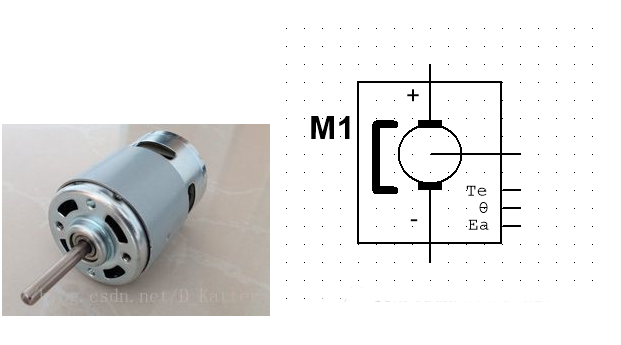
电机在生活中的应用非常广泛,将电能转换成各种场合特定的机械能,以满足日常工业生产及生活。其中常用的直流电机,因为良好的调速性能在电力拖动中得到了很好的应用。结合Multisim仿真软件,设计电路对象选择永磁直流电机。
2.选择传感器对像
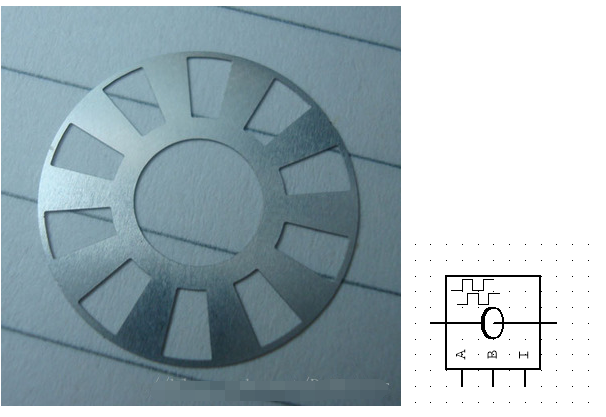
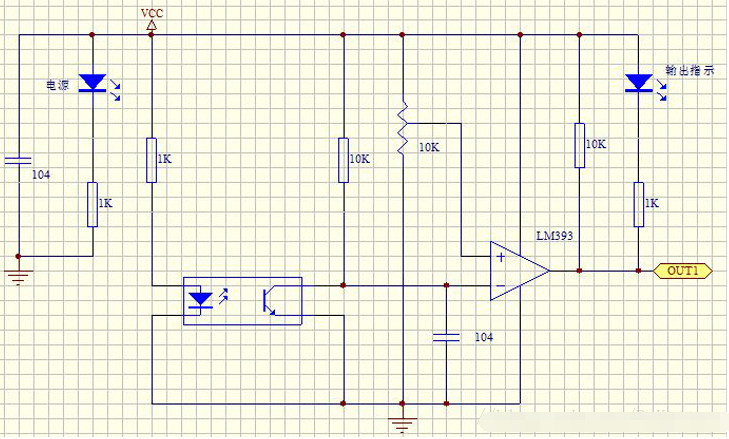
传感器用来检测电机的速度,这里选择ITR9606 光电传感器,即对射式的槽型光耦。选择这种传感器的原因是价格便宜,原理简单,虽然不能非常精确的检测电机的转速,但是在一定程度上能够满足大部分场合的需要,而被人们广泛应用。

这种槽型的光耦在用来检测电机速度的时候,还需要在电机的轴上加上一个圆盘,圆盘跟随着电机轴一起转动。在圆盘上一般会有凹槽或者圆孔,如果光耦输出的信号被当住,那么在传感器的输出端会输出低电平,如果输出的光信号能从孔中穿过而被正常接收,那么输出就是高电平。
现在市场上应用比较多的一般是将编码器和电机外壳做在一起了,这样做,精度和安全性以及使用寿命肯定比都分离开的要好。考虑到原理一样,都是通过编码器测量输出的高低电平来计算出电机的转速,为了便于后续的仿真,所以这里选择价格便宜的独立的器件进行分析和设计。
市场采用的设计如下:
3.传感器特性分析
根据官方文档资料,传感器的关键特性参数如下所示
工作电压 3.3~5V 输出形式 开关量输出0/1
遮挡时 1 无遮挡时 0
如果将输出的开关量输入到单片机的I/O口,通过多次测量高点平或者低电平的时间,求取平均值,这样是为了保证测量值是电机的稳定的条件下测量的,那么就知道电机的转速了。
4.驱动电路设计
在设计驱动电路的必须明确的一点就是设计的效果是怎样的。如果驱动的是简单的小功率或者单向转动的电机,那么利用一个大功率三极管或者MOSFET就可以满足要求。因此,在一开始将驱动电路的设计目标定为可调速,可正反转。调速需要用到PWM,正反转需要用到H桥来驱动。H桥的桥臂,小功率的时候选择三极管就可以实现。大功率则要选择MOSFET来设计。
4.1 12V/3A直流电机驱动电路设计
如果选定的直流电机12V/2A,电流达到2A,考虑到效率,散热。功耗等问题,选择MOEFET进行设计显然是要优于大功率三极管的。
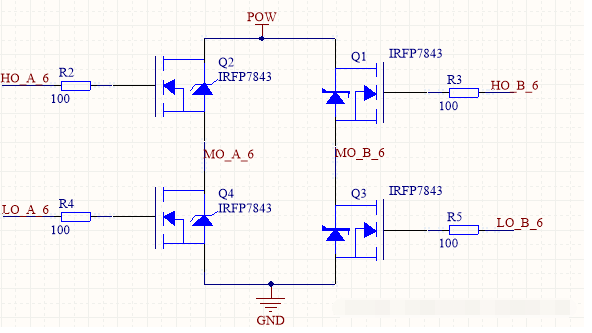
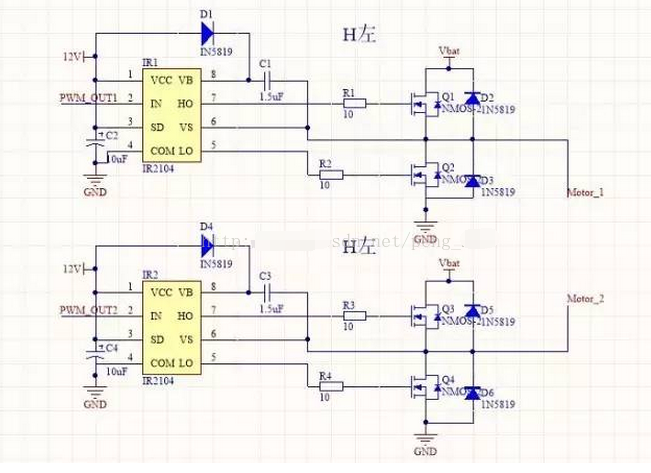
在设计H桥的时候,要考虑的首要问题就是在任何一边的上下两个桥臂不能导通,不然会造成电源的短路,电流非常大,直接将MOS管烧毁。因此,驱动MOS管的电路一定保证正传到反转具有“死区”时间。这里驱动MOS管的驱动电路选择可以设置“死区”时间的集成芯片IR2104。
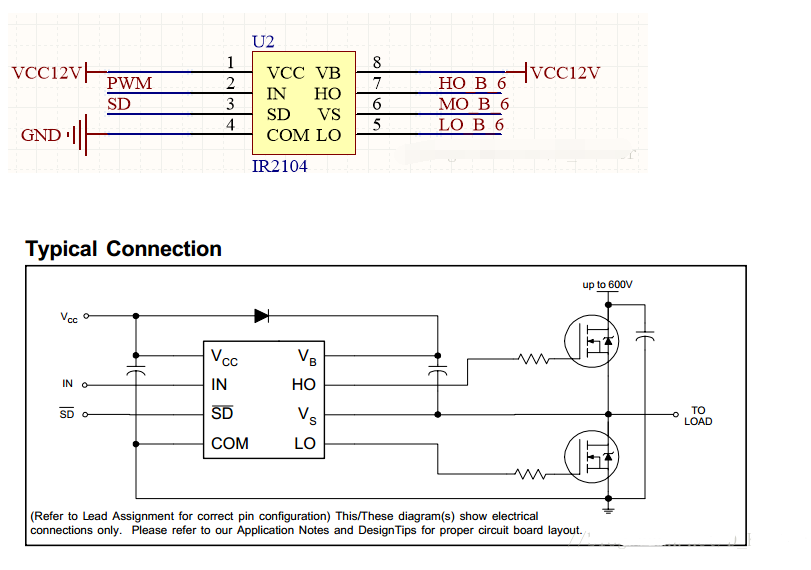
根据IR2104的数据手册可以看到,这是接的半桥形式,在应用H桥的时候,要使用两个IR2104。
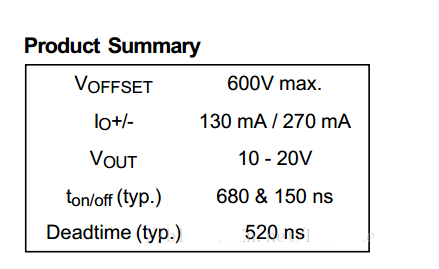
从数据手册里面还可以看到,该芯片具有的“死区”时间为520ns,可以保证上下桥臂不会在同时导通。如果根据需要还可以选择IR2101芯片,在单片机输出PWM波的时候就可以设置“死区”时间,综合考虑,IR2104操作起来方便,而且SD片选信号可以很方便的对两个IR2104进行控制。
选择集成的IR2104芯片作为驱动MOS管的驱动电路,主要是因为若采用推挽电路或者其他的分离元件进行驱动,高端的MOS管导通后,S级的电压为电源电压,这个时候是无法再进行开通,而会直接关断,选择集成的芯片能够很好的解决这个问题。如果上臂选择PMOS管可以避免这个问题,但是PMOS管在实际生活中应用很少,而且价格昂贵,所以综合各方面的因素,12V/3A电机驱动电路设计IR2104加上4个NMOS管组成的H桥电路。
4.2 5V/0.35A直流电机驱动电路设计
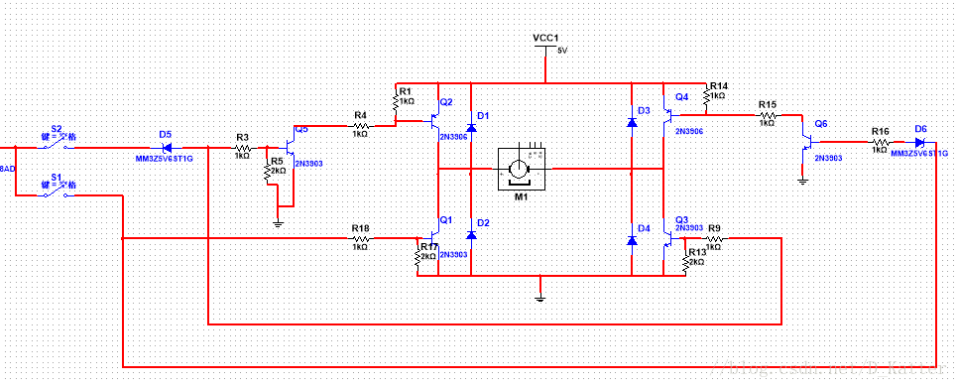
这种小型的直流电机在玩具当中应用特别多。驱动电路设计时,H桥的桥臂可以直接选择常用的8050和8550三极管即可,价格低廉,而且还容易做到。
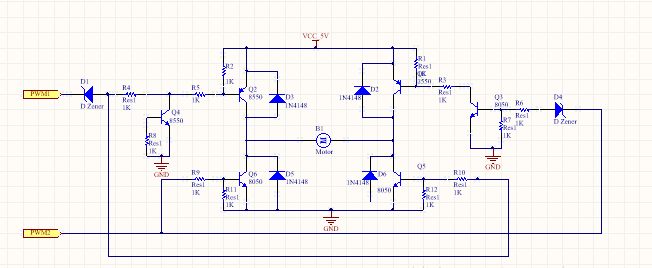
PWM1和PWM2为信号输入端,当需要控制电机正传的时候,将PWM1信号使能,PWM2信号关闭;当需要控制电机反转的时候,先将PWM1关闭,再将PWM2使能,这里利用单片机设置“死区”时间,来保证H桥的正常工作。
5.整体电路设计
5.1硬件电路设计
考虑到使用的仿真软件是Mulsitim,该软件中没有集成的芯片H桥驱动芯片,所以最后选择以5V/0.35A小型直流电机控制电路进行仿真。控制电机转速的PWM在仿真软件中,结合在课堂学习的滞回比较器使用运放产生可调节占空比的PWM电路。
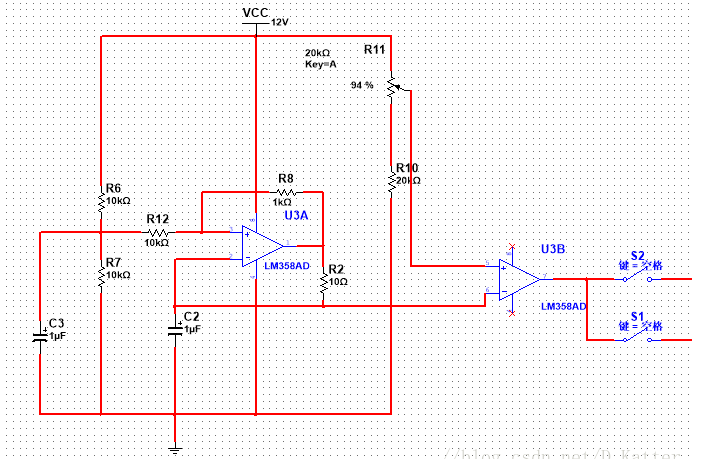
在PWM电路中,通过调节R2、C2、R12、R8来调节PWM的频率。调节比较器的同相输入端的电压,来改变占空比。
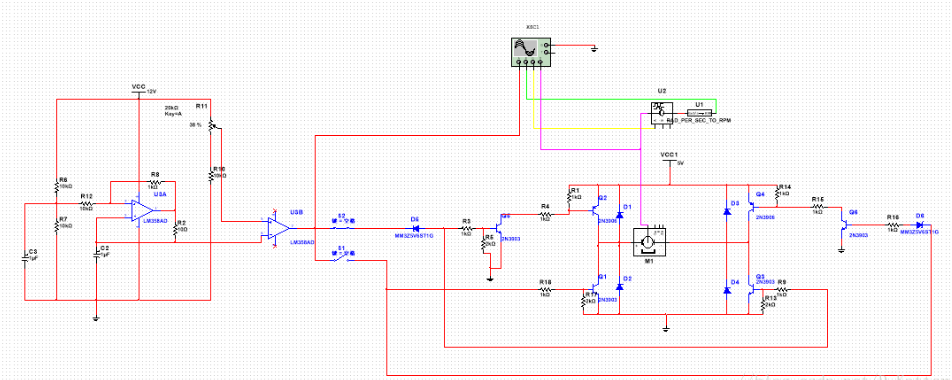
5.2电路仿真
5.3仿真结果分析
电机启动时:
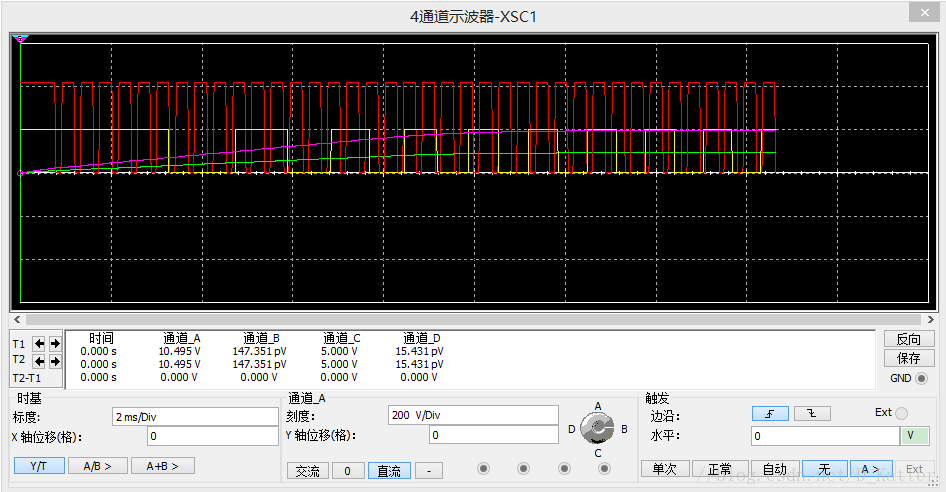
4通道示波器中红色显示的为PWM的占空比,此时的占空比为60%。黄色为编码器的输出为+5V的脉冲信号,当电机转动时,编码器模拟的前面设计的对射式槽型光耦。在启动的过程中,可以看到编码器输出高电平的时间再减少,说明转速是在增加。绿色线是测量的RPM,在仿真中用到了Rad/S转RPM转换器,转换成电压读数是90V。紫色线是直接测量电机轴的输出,在软件中转速是以电压体现的,在稳定的时候,转速转换成电压读数为189V。
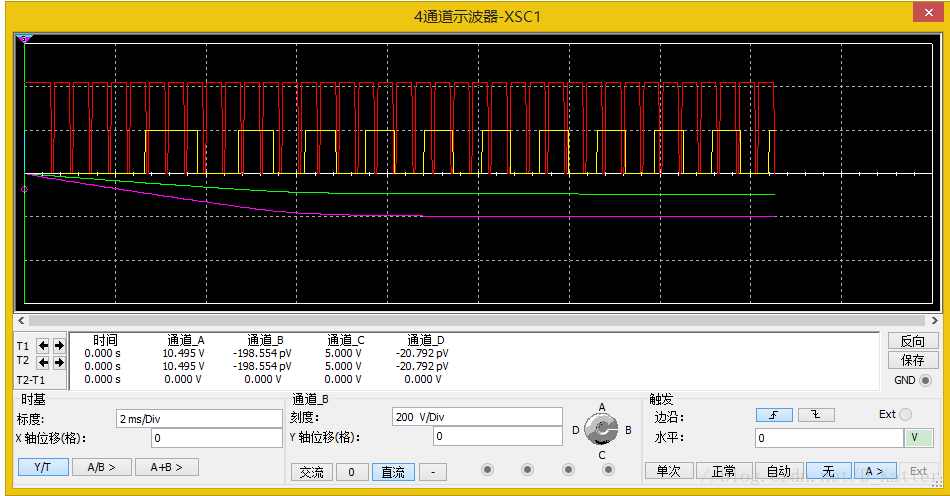
占空比改变时:

红色显示的PWM占空比,此时的占空比是80%,与图16相比,可以看到当占空比增加的时候,电机的转速增加,紫色线是转速电压示数为392V,占空比增加,转速明显增加。同时可以看到启动的时间也有所减小。
电机反转时:
6.总结
通过设计电机驱动电路,对槽型光耦传感器,H桥驱动电路,三极管搭建的H桥电路,以及利用三极管进行逻辑取反,利用运放搭建矩形波等等内容进行了相应的学习。加深了对直流电机驱动电路的设计的理解,同时熟练了mulsitim仿真软件的使用。在完成的过程中,遇到了理论性知识的错误,特别是控制分离元件的H桥逻辑,开始竟然理解错误了,后来实际的仿真和分析才发现了问题所在。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 离心压缩机和往复压缩机的区别
离心压缩机和往复压缩机的区别






 APP下载
APP下载 登录
登录







