×


如图,STM32的每个TIMER都有正交编码器输入接口,TI1,TI2经过输入滤波,边沿检测产生TI1FP1,TI2FP2接到编码器模块,通过配置编码器的工作模式,即可以对编码器进行正向/反向计数。
如下图,编码器使用了A,B两相信号,但是我只需要对TI1信号进行计数(第一行),我也是刚发现了这个错误,原来对两个信号都计数,导致码盘转一周得到不止100个脉冲(100线的光电码盘)。通过STM32的编码器模块比较两想的电平信号就可以很容易地计算出编码器的运行情况了。
下面是我调试OK的代码:
void Encoder_Configration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
//PC6 A相 PC7 B相
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // No prescaling
TIM_TimeBaseStructure.TIM_Period = 10000;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM8, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM8, TIM_EncoderMode_TI12,
TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = 6;//ICx_FILTER;
TIM_ICInit(TIM8, &TIM_ICInitStructure);
// Clear all pending interrupts
TIM_ClearFlag(TIM8, TIM_FLAG_Update);
TIM_ITConfig(TIM8, TIM_IT_Update, ENABLE);
//Reset counter
TIM2->CNT = 0;
TIM_Cmd(TIM8, ENABLE);
}
n_Counter = TIM_GetCounter(TIM8);
Diled_Disp_Num((float)n_Counter);
另外一个值得注意的问题是,STM32 的定时器是16位的,意思是只能计数到65535,有两种方法,一是采用链式的方式用两个定时器将16位扩展为32位,还有一种简单的方法就是开启定时器的溢出中断,每中断一次就代表编码器运转了特定的角度。
比如编码器是400线的,将ARR寄存器设置为400,每溢出中断一次就代表电机转了一圈,以此类推。
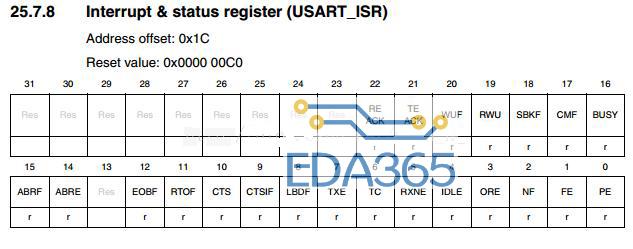
另外,关于输入脉冲的检测,其实是类似的,只不过在STM32内部是专门用了一个外部触发模块来实现的,如图一中紫色框的标注,编码器模块应该是在这个模块上的升级,下面是配置代码:
void TIM3_ETR_GetDropCounts_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
//test PA0 TIM8_ETR
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0x00;
TIM_TimeBaseStructure.TIM_Period = 0xFFFF;
TIM_TimeBaseStructure.TIM_ClockDivision = 0x0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); // Time base configuration
TIM_ETRClockMode2Config(TIM3, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0);
TIM_SetCounter(TIM3, 0);
TIM_Cmd(TIM3, ENABLE);
}
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 PIC单片机的多路AD切换程序设计
PIC单片机的多路AD切换程序设计








 APP下载
APP下载 登录
登录







