闭幕不落幕,创新不止步!IDAS 2025 设计自动化产业峰会圆满闭幕
TLC2543驱动程序(c51) /************************************** TLC2543驱动程序*************************************/#include#include/************************************** 2543控制引脚宏定义**************
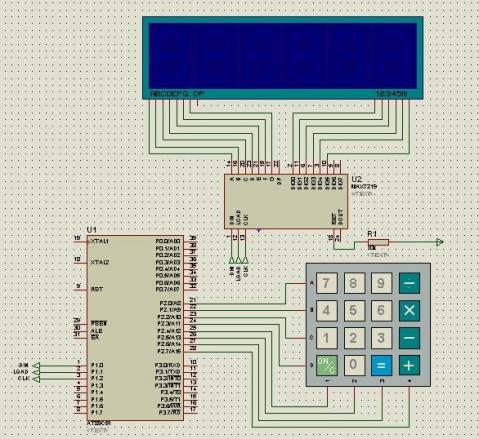
用单片机做一个计算器 硬件电路程序#include#define DIN P1_0#define CLK P1_2#define LOAD P1_1unsigned char key_h,key_l,key_code;unsigned char ADS,i,j,m,n;unsigned char n_bit=0;unsigned char flag=0;unsigned char key_num[16
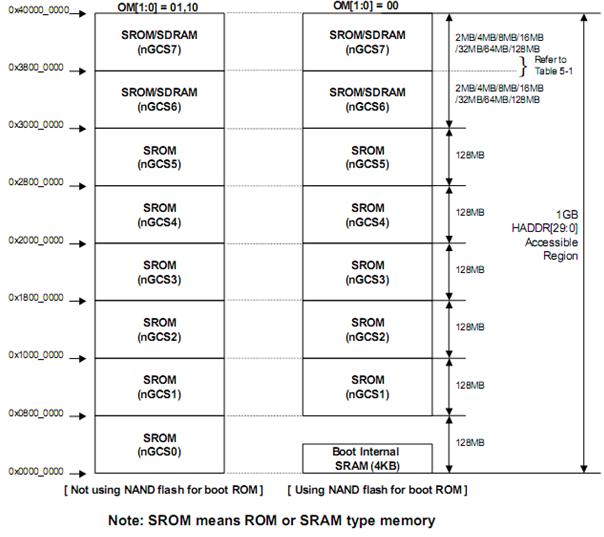
S3C2440电源管理有关问题及其解决方法 关于2440的电源管理调试出现过的问题以及解决方法:1.系统睡眠与唤醒.拿到普通的代码.出现的问题经常是进入睡眠后.GPIO唤醒总是导致系统重新启动.其实这是因为没有设置CPU的运行模式.而这运行模式是通过设置GP
MCS-51单片机之液晶显示 用MCS-51单片机来驱动液晶显示本已不属于单片机本身的知识了,我所用到的液晶是1602液晶屏,主要是要自已去查看相关芯片的文档,所以自然对英语阅读能力是一个不小的挑战.在看文档的时候,我们也只需要注意几个相对重要
单片机显示三位整数 利用数码管显示三位数是利用了单片机数码管的动态扫描,但此方法又有不同点,我们不再需要位选table,实现的具体思路是,先将要显示的3位数进行百位,十位,个位进行分离,然后再利用动态扫描将其显示即可. 源代码如下,
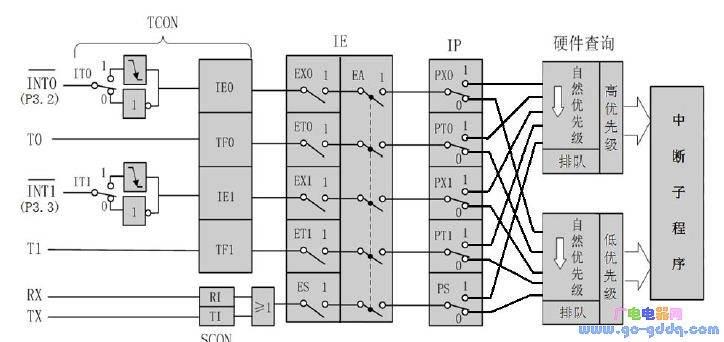
51单片机中断解释 解释 void timer0() interrupt 1 using 21.返回值 函数名 interrupt n 其中n 对应中断源的编号.其值从0 开始.以80C51 单片机为例.编号从0~4.分别对应外中断0.定时器0 中断.外中断1.定时器1 中断和串行口
DS18B20温度显示演示程序(6位数码管显示) #includesbit DQ = P3^3; //定义DS18B20端口DQ sbit BEEP=P3^7 ; unsigned char presence ; unsigned char code LEDData[ ] = {0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,

 APP下载
APP下载 登录
登录