
机器人自主定位导航看是简单实则需根据地图数据+算法的结合实现真正的自动化自动导航;机器人导航可以分为三个部分,包括定位、建图以及运动控制。而自主导航需要解决的是智能移动机器人与环境进行自主交互,尤其是点到点自主移动的问题,这需要更多的技术支持。下面我们通过用于机器人自动导航的超声波传感器这篇文章来了解机器人自动导航的相关技术支持。
众所周知,在动物界中蚂蚁和蜜蜂都是出色的导航员。撒哈拉沙漠蚂蚁可以在高于60°C的恶劣条件下觅食并生存下去。在这种极端环境下,它们无法像其他蚂蚁一样使用信息素跟踪自己的长距离路程返回巢穴。相反,他们采用一种被称为路径集成的生物计算。它们通过天空亮度指南针(它们看待天空亮度颜色的模式和我们人类有很大的差别)和计量学刺激来估计当前的位置。路径集成不仅可用于安全返回巢穴,还有助于学习所谓的矢量记忆。这些记忆已经被证明足以让蚂蚁和蜜蜂产生目标导向的导航。由于这些能力能够让蚂蚁和蜜蜂导航数百里,所以这种控制系统在人造代理设备的应用上具有很大的潜力。
随着科技自动化的发展,人类凭借机器学习和受昆虫启发的基于矢量的导航系统,代理设备可以无需依靠GPS就能够达到关键地点,实现真正的自动化。机器人可以使用摄像机和其他传感器获得的信息,根据环境感官线索学习如何独立导航。

障碍物的有效规避
基于图像的人体部位检测的深度学习,我们可以看到孩子在机器人面前移动,可能阻碍住了机器人,机器人要识别出这是人还是自行车,所以这就需要对人体部位进行检测识别不仅需要激光雷达,还需要多传感器数据的融合,实现有效避障和自主导航。工釆网提供两款超声波传感器倒是用于机器人自动导航他们分别是:
超声波避障传感器MB1043是一款高分辨率(1mm)、高精度低功耗的超声波传感器,它在设计上,不仅对干扰噪音做了处理,具备抗噪音干扰能力。而且对于大小不同的目标,和变化的供电电压,做了灵敏度的补偿。另外还具备标准的的内部温度补偿,使得测量出来的距离数据更加精准。应用于室内环境,它是一款很不错的低成本解决方案!
机器人超声波传感器 - MB7360是一款高分辨率(1mm)、高精度低功耗的超声波传感器,它在设计上,不仅对干扰噪音做了处理,具备抗噪音干扰能力。而且对于大小不同的目标,和变化的供电电压,做了灵敏度的补偿。另外还具备标准的的内部温度补偿,可选的外部温度补偿,使得测量出来的距离数据更加精准。直接输出精确的距离读数,节省了MCU的资源,更合适应用于机器人领域。
超声波定位导航
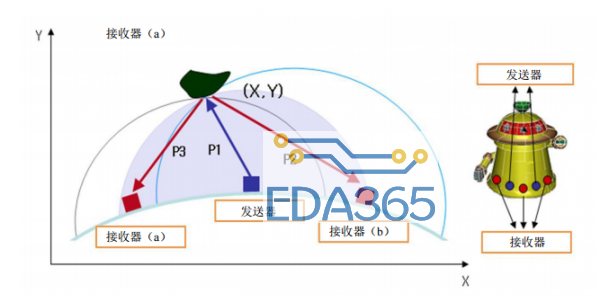
超声波定位导航的工作原理是由超声波传感器发射探头发射出超声波,超声波在介质中遇到障碍物而返回接收装置。通过接收自身发射的超声波反射信号,根据超声波发出及回波接收时间差及传播速度,计算出传播距离S,就能得到障碍物到机器人的距离,即有公式: S=Tv/2 式中,T—超声波发射和接收的时间差;v—超声波在介质中传播的波速。

优点:
成本低廉;
可以识别红外传感器识别不了的物体,比如玻璃、镜子、黑体等障碍物;
缺点:
容易受天气、周围环境(镜面反射或者有限的波束角)等以及障碍物阴影,表面粗糙等外界环境的影响;由于超声波在空气中的传播距离比较短,所以适用范围较小,测距距离较短。采集速度慢,导航精度差;
为解决超声波定位导航中的不足工釆网提供了超声波传感器 - MB1004的解决方案,该传感器是一款专门有高低电平报警信号输出的接近传感器,可测范围可达213cm,适用于行人检测、停车检测等。当行人进入检测范围内,MB1004就会输出由低电平变成高电平的报警信号。同时它也具备输出目标具体距离的功能,通过RS232输出距离数据。MB1004是一款非常低成本的人体检测超声波传感器。同样适用于接近区域探测、行人检测 展台/信息亭、机器人自动导航、自主导航、多传感器阵列、近距离检测等领域。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 采用STC12C5410AD处理器实现自动割草机器人主控系统的设计
采用STC12C5410AD处理器实现自动割草机器人主控系统的设计









 APP下载
APP下载 登录
登录







