×


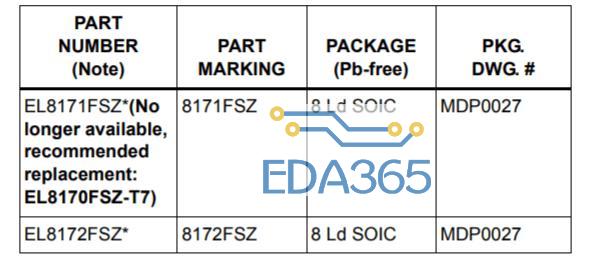
● 8位向上计数的自动重载计数器;
● 3位可编程的预分配器(可在 运行中修改),提供1, 2, 4, 8, 16, 32, 64 和128 这8种分频比例。
●
– 在计数器更新时:计数器溢出。
几个相关的寄存器;
控制寄存器1 (TIMx_CR1)
控制寄存器2 (TIMx_CR2)
事件产生寄存器(TIMx_EGR)
状态寄存器1 (TIMx_SR1)
中断使能寄存器(TIMx_IER)
自动重装载寄存器(TIMx_ARR)
预分频寄存器(TIMx_PSCR)
计数器(TIMx_CNTR)
详细内容见:STM8S数据手册
8位定时器
main()
{
}
@far
{
}
0
16位定时器:
main()
{
}
//
//
//
//
@far
{
}
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

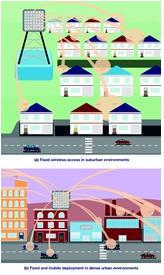
 无人机新突破:或将利用手机发射塔追踪无人机
无人机新突破:或将利用手机发射塔追踪无人机






 APP下载
APP下载 登录
登录







