
火箭炮能否迅速展开火力打击是衡量其武器系统作战性能的重要因素。火箭炮在对目标实施准确打击之前,必须对其进行精确的调平。目前,部队在对火箭炮车体平台进行调平时,调平过程复杂,协调要求高。调平过程通常需要三个人配合完成,一人站在梯子上观察放于回转盘水准仪检查座上的水准仪,两人位于车下手动操作两个千斤顶,一般要经过多次调试才能完全使车体纵横向水平。检查调整完后,若车体水平发生变化,又要重复以上调平过程。这种调平方式耗时长,调平过程繁琐、费时费力,且不便于指挥、协调困难,精度也得不到保证。因此,部队亟需一种能动态显示车体姿态,并指示操作手操作的指示器。本文基于STC12C5616AD单片机设计一种能够对车体平台的倾斜状态进行自动显示的操作指示器。
操作指示器的组成及工作原理
操作指示器结构组成如图1所示,由主控制器、无线数传模块和液晶显示屏等组成。其工作原理:操作指示器通过无线数传模块接收到从倾斜检测仪输出的纵向和横向倾斜角度数据,并对数据进行处理和运算,然后通过液晶屏幕显示出车体的纵横向倾斜角度,并根据数据的运算结果,指示出左右两个千斤顶需要进一步调整的方向。倾斜检测仪放置于回转盘水准仪检查座上,两个操作指示器分别吸附于两个千斤顶旁或戴在操作人员手臂上,两名操作手观察各自的指示器即可调平车体。液晶显示采用的是COG封装的12864液晶屏,采用串行SPI总线驱动,这种液晶屏幕驱动芯片直接集成到玻璃基板上,体积小、省电,背光电路设计灵活。
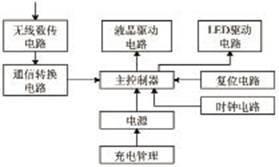
图1 操作指示器结构组成图
主控制器的选型及电路设计
主控制器的选型
操作指示器的控制核心选用STC12C5616AD单片机。该芯片具有如下特点:
(1)高速:1个时钟/机器周期,增强型8051内核,平均指令运算速度比标准8051快8~12倍。
(2)宽电压:5.5V~3.3V。
(3)增加第二复位功能脚(高可靠复位,可调整复位门槛电压,频率<12MHz时,无需此功能)。
(4)增加外部掉电检测电路,可在掉电时,及时将数据保存进EEPROM,正常工作时无需EEP。
(5)低功耗设计:掉电模式(可由外部中断唤醒),可支持下降沿/上升沿和远程唤醒。
(6)低功耗设计:空闲模式(可由任意一个中断唤醒);掉电模式(可由外部中断唤醒),可支持下降沿/上升沿和远程唤醒。
(7)工作频率:0~35MHz,相当于普通8051:0~420MHz。
(8)时钟:外部晶体或内部RC振荡器可选,在ISP下载编程用户程序时设置。
(9)8/16/20/32/40/48/52/56/60/62K字节片内Flash程序存储器,擦写次数10万次以上。
(10)1280字节片内RAM数据存储器
(11)ISP/IAP,在系统可编程/在应用可编程,无需编程器/仿真器。
(12)8通道,10位高速ADC,速度可达25万次/秒,2路PWM还可当2路D/A使用。
(13)2通道捕获/比较单元(PWM/PCA/CCP),也可用来再实现2个定时器或2个外部中断(支持上升沿/下降沿中断)。
(14)4个16位定时器,兼容普通8051的定时器T0/T1,2路PCA实现2个定时器。
(15)可编程时钟输出功能,T0在P3.4输出时钟,T1在P3.5输出时钟,BRT在P1.0输出时钟。
(16)硬件看门狗(WDT).
(17)高速SPI串行通信端口。
(18)全双工异步串行(UART),兼容普通8051的串口。
(19)先进的指令集结构,兼容普通8051指令集,有硬件乘法/除法指令。
(20)通用I/O口(36/40/44个),复位后为:准双向口/弱上拉(普通8051传统I/O口)可设置成四种模式:准双向口/弱上拉,推挽/强上拉,仅为输入/高阻,开漏每个I/O口驱动能力均可达到20mA,但整个芯片最大不超过100mA。
主控制器电路设计
操作指示器的主控制器采用的芯片是STC12C5616AD单片机,具备一个串口UART0和一个SPI总线接口,采用的3.3V供电,具有低功耗,指令执行效率高的特点。由于ZigBee无线数传模块和LCM屏都采用TTL电平驱动。因此,控制器通过UART0直接接到无线数传模块上;通过SPI总线相关端口,直接接到LCM模块的数据传输端。具体的电路原理如图2所示。
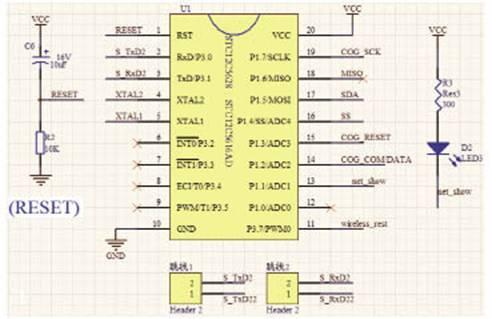
图2 操作指示器主控制器电路原理图
显示屏的简介及其接口电路设计
显示屏的简介
实际上,可将一般单纯的TN型与TFT型液晶显示器面板视为仅仅是一个经由组合上下两片玻璃后并灌注进液晶的一个简单结构品。在应用时,必须施加驱动电压到LCD的接口端上,这样才可以通过电能所产生的电场将液晶分子按照要求分布,由此产生显示画面。通常,把驱动LCD的技术都集成在一个IC芯片(Driver IC)上,由其产生驱动电压波形。简单地讲,LCM(Liquid Crystal Module)就是把此Driver IC与LCD面板连接起来,可以完成LCD显示功能的模块。随着商品的不断多样化,各种数码产品对液晶模块(LCM)的形式、性能要求也不断地丰富、更新,不断地加入其他组成部件:柔性印刷电路板、背光模组、印刷电路板等,使LCM能够满足多种产品的需要。目前,LCM的工艺已经发展为体积小、薄形化技术。按照Driver IC的封装形式分为COG工艺、TAB工艺和COF工艺。在此主要介绍COG工艺。
COG(Chip On Glass)工艺:使用的Driver IC为COG IC,该技术通过把Driver IC直接安装在液晶面板玻璃底板上,从液晶面板外挂的印刷电路板上去掉液晶驱动器IC,减小了电路面积,且易于大批量生产,适用于消费类电子产品所用的LCD,如:手机、PDA等便携式电子产品。在COG工艺中,采用ACF将IC与LCD连接起来,使得COG IC芯片直接连接在玻璃上。关键点是IC的BUMP对准LCD的ITO线路,不能偏移,为了避免这一点,在LCD面板上设计有COG工艺对位标记,在COG IC芯片上也要设计相应的对位标记。在进行压合前,要找到二者的对位标记,对准后进行压合,从而使COG IC与LCD上的ITO线路导通。
TAB(Tape Automated Bonding)工艺:将封装形式为TCP(Tape Carrier PACkage, 带载封装)的Driver IC用各向异性导电膜依次固定在LCD和PCB上。这种安装方式可减小LCM的重量、体积,安装方便,可靠性较好,是比较成熟的工艺技术。
COF(Chip On Film)工艺:芯片被直接安装在柔性PCB上。这种连接方式的集成度较高,外围元件可以与IC一起安装在柔性PCB上,是一种新兴技术。
目前LCD模块的各种工艺技术中,能够做到较小、较薄体积的,应属COG及COF工艺。本文指示器中采用的就是COG封装形式的12864屏。
COG12864接口电路设计
操作指示器的液晶显示屏,采用的是COG封装形式的12864屏,最大尺寸为43mm×40mm,加上背板电路后的厚度也仅为5mm,功耗在不带背光的情况下只有10mW,在带有背光的情况下也不大于100mW。工作电压仅为3.3V,内置升压电路,外部只要配上相应的电容即可。其电路原理如图3所示。
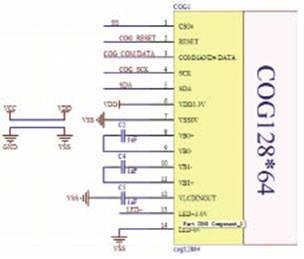
图3 COG12864接口电路原理图
无线通信模块选型及其通信联络
操作指示器与倾斜检测仪之间的控制指令采用无线传输方式,用以实现操作操作指示器与倾斜检测仪的数据通信。
无线通信模块的选型
操作指示器无线通信模块选用的是深圳振通公司推出ZT-TR43C无线数传模块,该模块的主要特点有:
①频率源采用高稳定度晶体振荡,频率稳定度高,抗干扰性强;
②透明式数据传输,方便灵活;
③可长时间连续发射;
④同时具有串口通讯即状态触发功能;
⑤接收具有省电功能,适用于电池供电的场合;
⑥具有良好的发射匹配,辐射场强大,单位功率通信距离远。
该模块的主要技术指标为:
① 载波频率433MHz,工作频率428MHz~435MHz;
②最大发射功率为20mW,接收灵敏度为﹣105dBm,开阔地的最大传输距离为3km;
③采用FSK调制,采用前向信道纠错编码,抗干扰能力强;
④有八个工作信道可供选择;
⑤传输速率20kbps;
⑥降低噪声放大器LNA、功率放大器PA、压空振荡器VCO等大部分功能集成在芯片内,外围电路简单易于开发。
无线通信模块通信联络
无线数传模块具有无线接收和发送的功能,本文采用无线数传模块ZT-TR43C实现执行终端与控制中心通信。在通信前串口的数据帧格式与速率应与模块的设置一致。上位机与模块间的通信内容有两类:一类是数据,一类是命令。数据或命令是靠DTR或DSR信号来区分的。
ZT-TR43C的命令传送格式为:
![]()
其中,D7H为命令码的特征码即字头,命令码为一个字节长度,代表命令的性质。不同的命令码有不同的参数。模块收到命令后,根据命令码的不同,分析参数并执行命令。对于有些发送信息的命令,模块将根据命令的性质发送相应的命令。具体的程序实现思想如下:
(1)无线数传模块发送过程:当模块收到上位机的数据后,模块先通过DTR线判断收到的数据是命令还是发送数据,若是命令则执行相应的命令;若是发送数据则先将要发送的数据送到发送缓冲区,并同时将模块的状态由接收状态转换成发射状态,这个转换过程需要100ms,状态转换完成后启动发送打包程序。发送打包程序的功能是将缓冲区的数据打成适合无线发送的数据包,并将一些控制命令动态地插入到数据包中。然后将这个数据包的数据送到模块中的数据调制口,按V23协议以FSK的调制方式发射出去。在这个过程中所有的进程均是并行完成的。
(2)无线数传模块接收过程:在接收状态下,接收机总是接收码流中的同步信息,一旦收到同步信息立刻进行位同步,获得位同步后进行码同步,码同步完成后接收数据及控制信息。收到数据后,按规定的串口帧格式传送给上位机。
无线数传模块采用的是2.4GHz的通信频段,有效的通信距离为300m,具备自动组网功能。其控制程序分为模块的设定和模块的使用两部分。模块的设定需要使用厂家提供的HAC_studio软件进行设置,设定无线模块的通信方式、通信的功率和通信的信道。通信方式采用的是透明工作方式,加电后自动搜寻网络。
通信的波特率默认为138400bps,单片机需要9600bps,信道采用默认信道0A。握手程序采用操作指示器向倾斜检测仪发送握手数据0x55、0xAA,倾斜检测仪通过中断的方式收到握手数据后,回复握手数据给操作指示器,无线握手完成。无线数传模块控制程序如图4所示。

图4 无线数传模块控制流程图
操作指示器PCB板图
图5所示为操作指示器的PCB板图。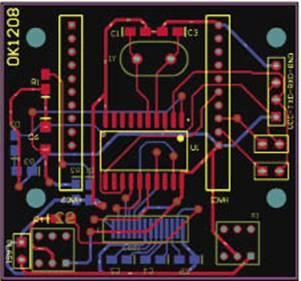
图5 操作指示器PCB板图
操作指示器结构设计
操作指示器机壳整体采用铝合金加工,内置电路板、显示器、电源和无线通信模块。底部嵌有磁铁,可以吸附于车体或千斤顶上,两侧有扣环,可以将指示器扣于手臂上,便于随身携带和观察。操作指示器实物如图6所示。

图6 操作指示器 实物图
结束语
目前,火箭炮车体调平过程费时费力,部队亟需一种能动态显示车体姿态,并指示操作手操作的指示器。本文首先阐述了操作指示器的组成及工作原理,然后通过分析比较,选择了操作指示器的主控制器、液晶显示屏和无线数传模块,并完成了主控制器和显示屏的电路设计,阐述了无线数传模块的通信联络,最后完成了操作指示器的结构设计。该操作指示器工作运行可靠,能指示操作手进行车体调平,有效提高了调平工作效率。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 浅谈IP技术在网络电视中的应用
浅谈IP技术在网络电视中的应用







 APP下载
APP下载 登录
登录







