×


Ⅰ、写在前面
在某些特定场合,需要精确的延时(us级),特别是底层驱动。如果使用软件延时,延时会随系统时钟改变及各种因素影响而改变。因此,就需要使用TIM精确延时。
阻塞式延时:从延时开始至结束,程序一直阻塞在那里,不会跳转到其他地方(除中断)执行程序。不理解的朋友可以自己网上搜索答案。
TIM的种类和功能很多,本文是基础的知识,讲的比较简单,关于定时器更加强大和实用的功能可以关注我后面的文章。
为方便大家阅读,本文内容已经整理成PDF文件:
http://pan.baidu.com/s/1i5uWhJR
Ⅱ、TIM基础知识
STM8S的定时器(TIMER)类型有三类:基本定时器、通用定时器和高级定时器。基本定时器是8位计数的定时器,通用和高级定时器是16位计数的定时器。
定时器因类型不同,其功能和复杂程度不同,适用的场合也不同。本文以最基础、最简单的8位基础定时器来讲述TIM的延时。
强调一点:8位计数定时器,最大计数值为256。
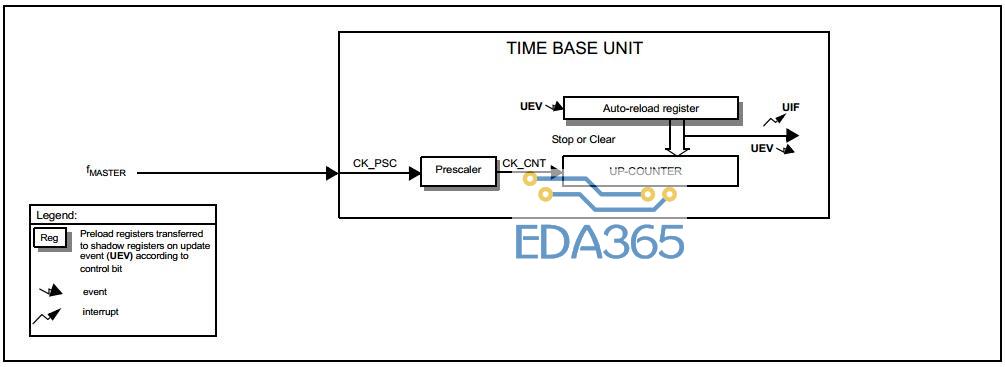
TIM4基础定时器功能:
Ø 8位向上计数(UP-COUNTER)的自动重载计数器;
Ø 3位可编程的预分配器Prescaler(可在运行中修改),提供1, 2, 4, 8, 16, 32, 64 和128这8种分频比例。
Ø 中断产生:若使能了中断,在计数器更新时(计数器溢出)产生中断,本文未开启中断。
Ⅲ、软件工程源代码
1、关于工程
本文提供的工程代码是基于前面“STM8S_Demo”增加TIM定时器修改而来。初学的朋友可以参看我前面对应的基础文章,那些文章讲的比较详细。
软件工程源代码实现功能:通过阻塞式延时(500ms)改变LED亮灭状态来观察延时的大小。若要测量延时的精确性,可以将TIMDelay_Nms(500)改为其他TIMDelay_N10us(10)(延时100us),通过示波器测量LED引脚的频率为5KHz(周期为200us)。
2.软件概要说明
本文提供软件工程中包含的内容比较简单:
系统初始化:System_Initializes
v BSP_Initializes:时钟初始化CLK_Configuration和GPIO_Configuration初始化;
v TIMER_Initializes:定时器初始化,本文重点内容。
功能实现:while(1)
3.代码分析说明
关于BSP_Initializes中的内容这里不再详细说明,请见上一篇文章:STM8S_001_GPIO基础知识
本文重点讲述bsp_timer.c文件的内容:
A.TIMER_Initializes定时器初始化
void TIMER_Initializes(void)
{
TIM4_TimeBaseInit(TIM4_PRESCALER_2, 79);
TIM4_ClearFlag(TIM4_FLAG_UPDATE);
}
我们提供的软件工程是实现10us的延时,实现的公式为:16MHz / 2 / (79+1) = 0.1MHz(100KHz)。
第一个参数TIM4_PRESCALER_2:即2分频,这个参数具体为如下:
typedef enum
{
TIM4_PRESCALER_1 = ((uint8_t)0x00),
TIM4_PRESCALER_2 = ((uint8_t)0x01),
TIM4_PRESCALER_4 = ((uint8_t)0x02),
TIM4_PRESCALER_8 = ((uint8_t)0x03),
TIM4_PRESCALER_16 = ((uint8_t)0x04),
TIM4_PRESCALER_32 = ((uint8_t)0x05),
TIM4_PRESCALER_64 = ((uint8_t)0x06),
TIM4_PRESCALER_128 = ((uint8_t)0x07)
} TIM4_Prescaler_TypeDef;
第二个参数79:这个参数的值,实际上的自动重载寄存器(Auto-reload register)的值。从公式中可以看出,它是得出10us延时的来源。
很多人不理解为什么不是80,而是79呢?
原因是计数是从0开始的,0至79就是计数80个,因此这里是79。
语句TIM4_ClearFlag(TIM4_FLAG_UPDATE):
这条语句的意思很简单,清除UPDATE更新标志位。
B.延时N个10us:void TIMDelay_N10us(uint16_t Times)
void TIMDelay_N10us(uint16_t Times)
{
TIM4_SetCounter(0); //计数值归零
TIM4_Cmd(ENABLE); //启动定时器
while(Times--)
{
while(RESET == TIM4_GetFlagStatus(TIM4_FLAG_UPDATE));
TIM4_ClearFlag(TIM4_FLAG_UPDATE);
}
TIM4_Cmd(ENABLE); //关闭定时器
}
为什么是N个10us?
从上面定时器初始化可以知道,一个计数的过程(延时)是10us,参数Times代表要执行延时10us的次数。
TIM4_SetCounter(0);
每次启动定时器之前,将计数值归零,这样才能保证第一次计数(延时)准确。
while(RESET == TIM4_GetFlagStatus(TIM4_FLAG_UPDATE));
这一条语句代表程序在这里不停地读取更新标志位TIM4_FLAG_UPDATE(阻塞),直到读取标志位有效(计数满),则跳出这个while循环。
TIM4_ClearFlag(TIM4_FLAG_UPDATE);
清除更新标志位TIM4_FLAG_UPDATE。在上面标志位有效之后,需要清除,清除之后有进行下一个计数过程。
这里的启动和关闭定时器相信都能理解,从执行TIMDelay_N10us这一个函数开始到结束操作过程的开关。这里提醒一点:计数的过程的一个循环的过程,过程中尽量避免重复开关定时器(会有一定的耗时),我提供的TIMDelay_Nms其实严格来说不是很准确,该函数就是重复了开关。
C.具体实现功能
在main函数中的while里面就是本文源代码实现的具体功能,将一个LED灯(IO)高低交替输出,中间使用定时器比较精确的延时500ms,达到LED亮灭的效果。
代码:
while(1)
{
LED_ON; //LED亮
TIMDelay_Nms(500);
LED_OFF; //LED灭
TIMDelay_Nms(500);
}
这里TIMDelay_Nms函数严格来说存在一定的偏差,从上面的讲述,相信都知道如何修改来避免这样的误差。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 NTMD6N03R2G的技术参数
NTMD6N03R2G的技术参数






 APP下载
APP下载 登录
登录







