APP下载
APP下载 登录
登录







本文主要阐述通过在PSpice观察一个电路示例来学习运算放大器的频率补偿。
运算放大器旨在与以提供负反馈的方式连接的外部网络结合使用。当信号在反馈环路周围传播时,首先通过运算放大器然后通过反馈网络传播,它会经历一系列延迟,这往往会危及电路的稳定性。
实际上,如果这些延迟的累积效应导致180°的相位滞后,则反馈从负变为正; 此外,如果具有正反馈,则环路周围的总增益超过1,则信号将以再生方式累积并导致不稳定。为了防止这种情况发生,有必要对运算放大器或反馈网络或两者的动态变化进行适当的改变,这些改变通常被称为频率补偿。
在本文中,我们将讨论运算放大器频率补偿及其在电路稳定性中的重要性。
运算放大器频率补偿
如今,大多数运算放大器都通过合适的片上元件进行内部补偿。通常,补偿旨在用于闭环增益,一直到电压跟随器操作的单位增益。运算放大器的一个子类过来补偿以上的值的闭环增益更大的大于单位,例如10 V / V。它们被称为失代偿运算放大器,它们提供的动态比它们已被补偿的单位增益更快。
如果反馈网络包含有源元件,无论是有意还是寄生,则电路的稳定性可能受损,在这种情况下,用户有责任适当地修改反馈网络的动态,以便确保所需的稳定程度。容性负载,杂散输入电容和复合放大器提供了不稳定情况的熟悉示例 ,后者的特征在于反馈网络本身包括另一个运算放大器。
运算放大器的内部补偿:示例电路
即使用户无法控制内部补偿,但对于更有效地运用运算放大器,必须具备对内部补偿的基本了解。
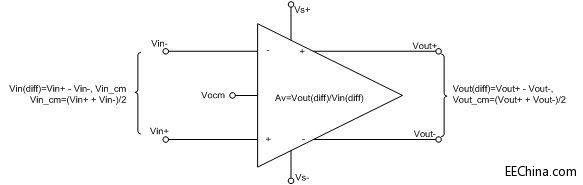
许多运算放大器包括(1)提供差分增益的输入级,(2)提供额外增益的中间级,以及(3)提供功率驱动的输出级。沿着每级信号路径的节点的晶体管和杂散电容产生延迟,我们将它们集中在一起并与低通RC网络建模,如下图所示。(为简单起见,我们将忽略输出的延迟阶段因为它通常要快得多;在不需要电源驱动的片上系统中,这个阶段通常会被完全省略。)
我们希望研究运算放大器的总增益 a = V o / V d,也称为开环增益。在DC,所有电容器都用作开路,增益a取值。
在交流操作中,电路呈现两个极点频率,
现在让我们来看看PSpice在反馈操作中观察这个放大器。与图2中的元件值,等式(1)和(2)给一个0 = 400×250 = 10 5 V / V = 100分贝ƒ 1 = 6.366 kHz和ƒ 2 = 254.6千赫。
在输出节点和反相输入节点之间连接分压器R 3 -R 4 建立负反馈操作,反馈因子 β 为
并且将电路配置为非反相放大器 r,其闭环增益V o / V i是理想的
将R 4步进到0,9kΩ,99kΩ,999kΩ和9,999kΩ的值会产生图3的闭环图(为方便起见,还显示了开环增益a的图)。
我们观察到,对于A 理想值的较大值,AC响应是相当平坦的,但是对于较低的A 理想值,存在增加的峰值量。我们通过注意到,因为1 /β = A 理想,所以降低A 理想意味着降低1 /β曲线,从而将交叉频率移向|陡峭斜率的区域。a | 曲线。
由此导致的闭合速率(ROC)的增加降低了电路的相位裕度,从而引起不稳定性。(只有两个极点,我们的电路不会振荡,虽然它会在低增益时表现出无法忍受的峰值和振铃;但是,在我们的简化运算放大器模型中没有考虑的额外高频极点的存在可能会导致振荡的电路)。
很明显,最容易振荡的配置是单位增益电压跟随器,β= 1。如果运算放大器补偿了单位增益运算的足够相位裕度,那么对于所有其他闭环增益也会保持稳定。
显性极点补偿
在上图所有闭环增益中,由于没有峰值,最高增益(80 dB)具有最佳轮廓。这是因为它的交叉频率之间大约一半出现ƒ 1和ƒ 2,其中所述速率的闭合(ROC)是大约20dB / DEC,所以相位裕度大约为90°。
我们也希望所有其他收益享有类似的相位差,一直到单位增益。这需要| a | 曲线的整个斜率为-20 dB / dec 。因此,必须修改开环增益,使其轮廓由单极支配。








 热门文章
热门文章