APP下载
APP下载 登录
登录







描述
我想到了一个由小型机器人组成的自动化解决方案,可以自动在玩具键盘上演奏。我们选择的旋律不是任何音频文件,而是诺基亚开机铃声。
我的机器人平台,它的形状是很适合应用在键盘上的,由基于“脑”的Fishino Uno板(Arduino板的变体)和由Octopus驱动器制成的驱动系统组成。
通过专为Fishino Uno板创建的程序来处理音调,同时物理控制使用24个伺服电机来组成的机电系统,三个3D打印的红章鱼的八个触须连接到上边,动作由伺服机构通过简单但精确的杠杆机制控制。
细节
整个结构需要维持24个触须并承载尽可能多的伺服电机(每个都配有使用提供的螺钉拧在小轴的臂上),以及电路板(即框架......)是使用Google SketchUp设计的,使用PLA进行3D打印的;可以使用STL文件打印。然后,你必须在框架上使用一些金属部件,如触手支点;更准确地说,框架由几个部分(边缘,下部连接元件,前横向件......)组成,可以拧在一起。
每个伺服系统通过一根长方形状的杆(通过矫直0.9毫米不锈钢丝)驱动触手(这个触手的3D模型,STL文件可在我们的网站上以及项目的另一个文件中获得)。然后将导线弯曲,以便将两者都连接在伺服轴端和相应的触手。
由于要对触手施加压力,键盘可能会在操作过程中移动,因此建议将框架固定在键盘上,例如,您可以使用一些直角的金属条连接到底部。或者您可以将机械部分放置并拧到木制或塑料底板上,一旦确定了最佳位置,将其连接到键盘上,可以使用一些三维打印小方块,并将其拧到底板上。
主要功能
如何使用它,以及如何使用我们的特殊乐器。下面,我是功能说明。
Mem / PLAY:它允许在显示的位置开始执行演奏。打开时,允许进入“伺服位置设置模式”。
另外:它允许移动到下一个音调。在“伺服位置设定模式”中,它允许修改触手位置以便准确地按下按键。如果在打开时保持在这个音调上,则允许进入测试模式。
减:它允许移动到前一个音调。在“伺服位置设定模式”中,它允许修改触手位置以便准确地按下按键。如果在打开时保持在这个音调上,则允许进入测试模式。
退出/停止:它允许中断音调执行。如果在“伺服位置设置模式”下按下,则允许退出该模式并返回主屏幕。
R:它允许重置、重启系统。
重置所有伺服器的位置
在驱动与每个伺服器的枢轴上的触手相连的控制杆之前,我们必须将所有伺服器置于半圈位置(中心位置,-90°);这项操作是必要的,以确保一旦伺服系统归零,所有的臂都处于静止位置。为了重置所有伺服系统的位置,我们必须按住Exit / STOP键然后再打开电源;显示屏将显示“正在重置”消息,之后所有伺服器的枢轴将进入中心位置,显示屏将显示“重置成功”。现在释放按键。之后,在每个枢轴上的杠杆相应动作,相关的触手将按下(或不按下)相应的按键。
编程模式
看一下如何编程每个触手相对应的位置。必须为每个伺服器分配一个位置。
音轨选择/播放/停止
当系统处于待机状态时,显示屏将显示消息“轨道选择”,后跟实际轨道号(铃声)。要开始执行曲目,请按PLAY(显示屏将显示“Play track n°1”);停止再现按STOP。
组件
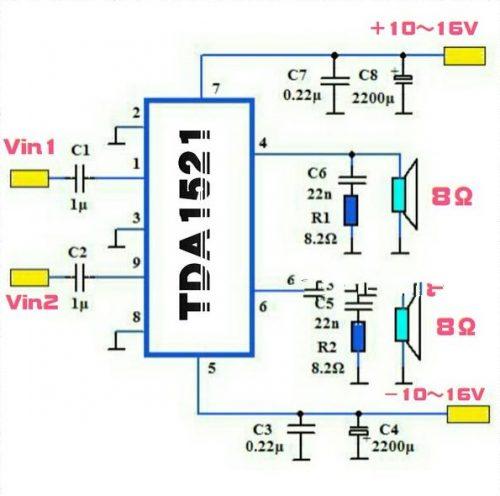
1×Fishino UNO
它是一块带有ATMEGA328的电路板,可通过Arduino IDE进行编程
26×迷你伺服
迷你伺服9g - 6V - 160°
1×电源
6-7.5Vdc 2A
1×显示
I2C显示16x2字符
机械部分
整个结构需要维持24个触须并承载尽可能多的伺服电机(每个都配有使用提供的螺钉拧在小轴的臂上),以及电路板(即框架......)是使用Google SketchUp设计的,使用PLA进行3D打印的;可以使用STL文件打印。然后,你必须在框架上使用一些金属部件,如触手支点;更准确地说,框架由几个部分(边缘,下部连接元件,前横向件......)组成,可以拧在一起。
每个伺服系统通过一根长的杆(通过0.9毫米不锈钢丝)驱动触手。 然后将导线弯曲,以便将两者都连接在伺服轴端。
触手可以跟随舵机摇摆; 为此,每个与其他触手并排放置的触手铰接在4毫米金属杆上。
杆的长度是不一样的,但舵机臂与相应触手的操纵杆底座之间的距离是确定的,其中一侧的所有机械装置都是在同一个位置上的。
这个图显示了杆如何连接到触手底座的细节,原型照片可以比任何东西更好地解释机械结构的组装方式,一旦完成,必须安装在键盘正面,以便每个触手可以按中一个键。
编程模式
打开键盘,按住Mem / PLAY键,然后打开电源; 显示屏将显示消息“编程”。
打开键盘,按住Mem / PLAY键,然后打开电源; 显示屏将显示消息“编程”。
释放按键。伺服将是从左起第一个开始(第一个八度音符的第一个音符); 显示屏将显示消息“programming servo n°1”。
按+或 - 键,相关的触手将按下,来播放音符。 完成后,再次按Mem / PLAY键移动到编程下一个伺服。
当您到达最后一个伺服时,按Mem / PLAY键结束编程(显示屏将显示“Programming Complete”消息)。
系统测试
现在你检查所有的触手是否正确按下指定的按键,为此你必须:
打开键盘,按住+或 - 键,然后打开电源; 显示屏将显示消息“测试”。
释放按键。
现在,触须将从左到右依次激活,以验证所分配的按键正确按下。 在测试结束时,系统将回到主界面的“Track selection”。








 热门文章
热门文章