APP下载
APP下载 登录
登录







摘要:介绍一种基于MSP430F2274单片机为核心的智能小车。小车采用超声波测距技术实现自动避障,同时通过语音模块来播报出小车与障碍物的距离。为了使测距不受温度影响,用温度传感器实时检测小车周围环境的温度并修正距离计算公式的参数,采用光电编码器来检测小车的速度,运用PID控制算法和PWM来控制小车的精确稳定的运行,从而达到预期的设计目标。
关键词:MSP430F2274;超声波模块;光电编码器;PID控制算法
智能小车涉及到高级计算机控制、电子机械、自动化等诸多学科,随着科技的不断进步,智能电子产品发展步骤不断加快,各种应用层次的机器人等大量出现,目前应用在智能小车或机器人的微控制器主要是8/16单片机或ARM和数字信号处理器DSP等。本设计采用TI公司生产的功耗低运行速度快且价格便宜的MSP430F2274为核心,避障检测采用测距精准的超声波传感器,该传感器采集小车周围的环境信息并传递给MSP430进行程序判断处理,从而达到控制小车自动避障的目的。
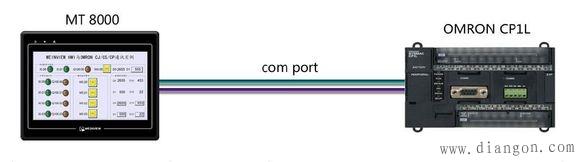
1 系统的总体结构框图
该系统主要由MSP430控制器,超声波避障模块,电机驱动,测速,语音模块,温度模块,小车的机械运动部分采用四轮差速转向式结构,前2个轮是驱动轮,分别由电机控制其运动,后两轮为随动轮。采用MSP430F2274单片机作为主控制单元,小车装有超声波模块来负责探测障碍物,做出避障决策。在小车的驱动轮上装有光电编码器对小车进行测速。为消除温度对测距的影响,使用温度传感器模块时刻检测小车周围的温度情况并修正。在小车上装配语音播报功能模块,能知道小车的位置和运行状态,总体结构框图
2 智能小车的硬件设计
2.1 主控芯片
该设计是以MSP430F2274单片机为控制的核心部件。MSP430是一款16位的超低功耗单片机,采用了精简指令集(RISC)结构,具有丰富的寻址方式,片内资源丰富,处理能力强大、系统工作稳定,主要是它具有多路PWM输出,以作为该设计电机控制的有利资源,系统主控设计图








 热门文章
热门文章