APP下载
APP下载 登录
登录







超声波汽车倒泊防撞报警器是超声波测距的一个重要应用。在汽车倒泊时,利用超声波的反射可以探测汽车尾部与障碍物之间的距离,提供多级声光报警。本文介绍一种以MC68HC705J1A单片机为核心的低成本超声波汽车倒泊防撞报警器的设计方法,该报警器的感应时间小于0.5s,测距精度可达0.1m。
1 超声波测距原理
超声波测距原理是根据超声波遇到障碍物后可反射回来的特性,记录发射信号到收到第一个反射信号的时间t,利用公式s=c·t/2,计算出距离s。其中c是声速,标准状态下声速c=331.4m/s。超声波测距原理如图1所示。
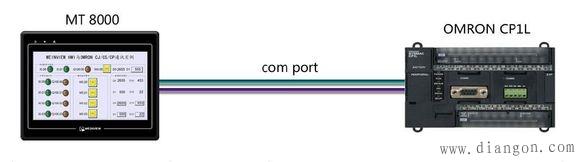
2 超声波汽车倒泊防撞报警器的组成
超声波汽车倒泊防撞报警器的组成如图2所示。
报警器只在汽车倒泊时才使用,采用倒车灯的电源+12V供电。倒车时障碍物可能在车的后面,也可能在车的侧面。为了保证各种情况下探测障碍物的准确性,采用双路探测结构,取两路中距离较短的一路作为有效探测距离。超声波探测头具有电声转换和声电转换两种功能,分时用于发送信号和接收信号。声光报警电路由单片机直接控制,利用不同的蜂鸣器鸣叫声音和不同颜色的LED闪动实现多段报警。
3 超声波汽车倒泊防撞报警器的硬件电路设计
超声波汽车倒泊防撞报警器的硬件电路原理如图3所示(图中只给出了一路检测电路,另一路与此相同)。
MC68HC705J1A单片机是Motorola公司J系列单片机中性能价格比最高的单片机之一,广泛应用于各种中小型检测控制系统中。MC68HC705J1A是一个具有1240字节EPROM/OTPROM的8位微控制器,主要硬件资源有:1240字节EPROM、64字节RAM、14个双向输入/输出端口、多功能计数器、外部中断等,同时具有看门狗和非法地址检测、无最小时钟频率选择等特点。在超声波汽车倒泊防撞报警器中,充分利用其双向并行口的输入和输出功能,进行信号的发送、接收及声光报警等控制。








 热门文章
热门文章