×


刚刚接触无人机的小伙伴,应该都时常听到GPS模式、运动模式、姿态模式这些名词吧,那么他们都代表什么含义呢,今天就来给大家讲讲。
1、GPS模式:适合新手。可定点定位,(使用最频繁的一种模式)
2、姿态模式:NAZA 没有装GPS,只能用此模式飞行。使用率一般,不能定点但可以定高。需要修正姿态,适合有一定飞行经验的玩家。
3、手动模式:可以判定飞行器重心是否合适,传说可以救机,或经验丰富高手用于3D飞行,很少人使用。不定点,不自动修正姿态。
1、GPS模式,大疆无人机称“P模式”。顾名思义,就是无人机使用GPS模块或多方位视觉系统实现精确悬停,指点飞行、规划航线等都需要在该模式下进行。
GPS信号良好时,无人机可以实现精准定位
GPS信号较差但光照良好时,无人机利用视觉系统实现定位,但悬停精度会变差
GPS信号较差并且光照条件也差的时候,无人机不能实现精确悬停,仅提供姿态增穏。无人机此时相当于姿态模式。

2、运动模式,大疆无人机称“S模式”。在该模式无人机通过GPS模块或下视视觉系统实现精确悬停,相比于GPS模式,该模式下操作无人机时灵敏度更高,速度更快。该模式主要为满足部分熟练飞手体验竞速而设置。不建议新手尝试。

3、姿态模式,大疆称为“A模式”。在该模式下,不使用GPS模块和视觉系统进行定位,无人机仅提供姿态増稳。实际操作中,无人机会明显的出现漂移,无法悬停,需要飞手通过遥控器来不断修正无人机的位置。姿态模式考验的是飞手对于无人机的操控性。在一些紧急情况下,需要切换姿态模式。

4、手动模式,大疆无人机默认没有该模式。一般用到手动模式的,都是玩穿越机的老司机,这种模式下,无人机的所有动作包括稳定姿态都需要飞手通过遥控器来控制,新手操作的话,比较危险。
大疆无人机可通过遥控器上的 飞行模式切换开关进行切换,在Dji Go应用中设置允许切换飞行模式,之后便可以自由切换。


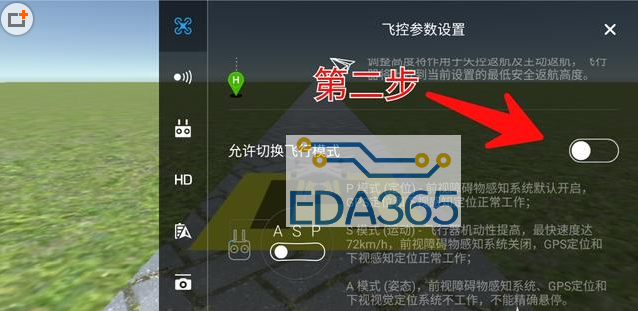
假如您想使用P模式以外的飞行模式,请按如下步骤操作:
在APP相机界面中,找到“飞控参数设置”,选择“高级设置”,打开“允许切换飞行模式”,才能使遥控的模式切换生效。否则遥控器切换档位后,飞行器仍是默认的P模式
精灵3的P模式是最为常用的模式,表现比较安全稳定。
P模式又分为P-GPS、P-OPTI和P-Atti三种模式,
在遥控器切换到P档时,这三种模式根据条件不同自动进行切换,并不需要手动调整。
[P-GPS]
P-GPS模式在卫星数大于或等于6个时自动启用,
此时飞行器可以实现空中准确悬停,而且卫星数越多,飞行器的悬停精度越高。
假如飞行器高度低于3米,视觉定位系统满足工作条件,同时提供视觉定位和超声波增稳。
因此,在P-GPS状态下,飞行器在水平和竖直方向都比较稳定。
[P-OPTI]
当飞行器接收不到卫星信号或卫星信号非常微弱,但飞行环境满足视觉定位条件时,
飞行器将自动切换到P-OPTI模式,这一模式仅限于飞行高度三米以下时使用。(超过3米高度,将为P-GPS或P-Atti模式。
此时视觉定位和超声波模块使飞行器在水平和垂直方向比较稳定。
注意:在室内飞行时,假如地面和光照不满足视觉定位条件,那么飞行器无法使用这个模式,
将自动切换到P-Atti模式(姿态模式)。
[P-Atti]
当飞行器接收不到卫星信号或卫星信号非常微弱,飞行的地面也不满足视觉定位条件时,飞行器将自动切换到P-Atti模式,即姿态模式。
在这一模式下飞行器仅能依靠气压计在竖直方向上相对稳定,而水平方向表现为自然漂移。
因此 P-Atti模式下,您需要手动调整飞行器的水平方向姿态,此时返航点无法成功记录。
这个模式下飞行器漂移存在炸机风险,最好避免进入这一模式。
建议新手在视矩内的近处使用飞行器,并且远离建筑或树木等障碍物,减少进入该模式的风险。
A模式是半手动的姿态模式,在使用时飞行器的表现与P-Atti模式相同,
飞行器在竖直方向比较稳定,水平方向表现为自然漂移。
这一模式是手动选择不使用GPS模块,使飞行器不使用卫星信号增稳,
与P-Atti的最大区别在于A模式是主动选择使用姿态模式,
而P-Atti模式则是由于条件不足被迫进入姿态模式。
这一区别也使A模式在卫星信号良好的情况下可以记录返航点,并实现准确返航。
P-Atti模式由于是卫星信号不足被动进入的,所以无法记录返航点,也无法准确返航。
F模式是高级应用模式。目前仅能使用F模式中的航向锁定功能。
航向锁定功能是用于确定一个飞行坐标系,X轴正方向为水平向右,Y轴正方向为水平向前,
当飞行器处于航向锁定状态时,无论机头朝向是哪边,飞行器对遥控信号的响应如下:
控制飞行器向右飞行时,飞行方向与X轴正方向一致;
控制飞行器向前飞行时,飞行方向与Y轴正方向一致。
因此,航向锁定又称为无机头模式。
航向锁定功能的开启办法如下:在飞控参数设置页面,找到高级功能选项,
点击进入后选择允许切换飞行模式和允许航向锁定模式。
请将遥控器切换到F档,
飞行器的机头方向已经设为Y轴正方向,向右飞行的方向即为X轴正方向,
坐标系确定不因机头旋转而改变。在高级功能选项中可重置坐标系的X和Y轴正方向。
小编提醒您最好不要切换飞行模式,GPS模式自带稳定和位置信息,所以飞行起来比较简单,而且飞行时候飘逸很小或者没,但是一旦切到姿态模式或者手动模式飞行器就会飘逸,高度会变化,所以控制起来难度增大,新手不建议切换。模式切换按键在左上角,一般切断自动返航或者失控保护的时候切到姿态在切回GPS来打断自动返航行为的。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 基于嵌入式系统的CAN总线网络通信流程设计
基于嵌入式系统的CAN总线网络通信流程设计






 APP下载
APP下载 登录
登录







