APP下载
APP下载 登录
登录







四轴飞行器是一种利用四个旋翼作为飞行引擎来进行空中飞行的飞行器。进入20世纪以来,电子技术飞速发展四轴飞行器开始走向小型化,并融入了人工智能,使其发展趋于无人机,智能机器人。

四轴飞行器不但实现了直升机的垂直升降的飞行性能,同时也在一定程度上降低了飞行器机械结构的设计难度。四轴飞行器的平衡控制系统由各类惯性传感器组成。在制作过程中,对整体机身的中心、对称性以及电机性能要求较低,这也正是制作四轴飞行器的优势所在,而且相较于固定翼飞机,四轴也有着可垂直起降,机动性好,易维护等优点。
系统方案
本设计采用STM32F4作为核心处理器,该处理器内核架构 ARM Cortex-M4,具有高性能、低成本、低功耗等特点。

设计总体框图
主控板包括传感器MPU6050电路模块、无线蓝牙模块、电机启动模块,电源管理模块等;遥控使用商品遥控及接收机。控制芯片捕获接收机的PPM命令信号,传感器与控制芯片之间采用IIC总线连接,MCU与电调之间用PWM传递控制信号。
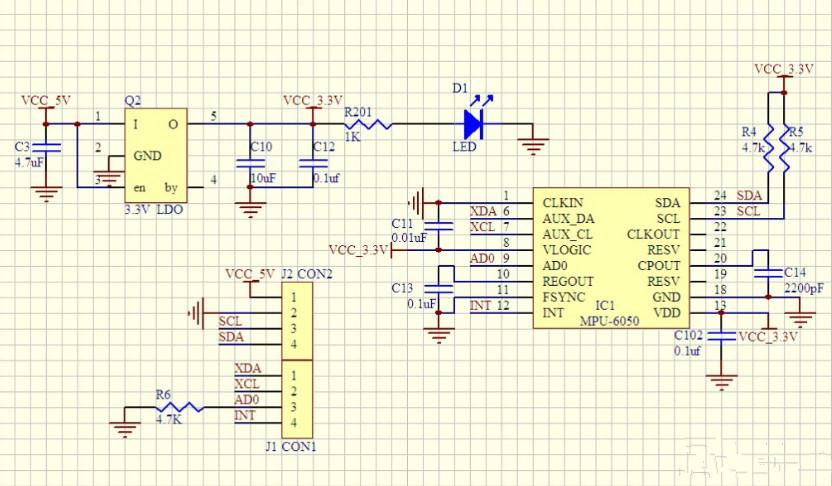
MPU-6050电路原理图
电源管理模块
四轴飞行器要求整体设计质量较轻,体积较小,因此在电池的选取方面,采用体积小、质量轻、容量大的锂电池供电最合适。系统的核心芯片为STM32F103,常用工作电压为3.3V,同时惯性测量传感器,蓝牙通信模块的常规供电电压也为3.3V,锂电池的电压为11.4V,要使系统正常工作,需要将11.4V的锂电池电压稳压到3.3V。常用的78系列稳压芯片已不再适用,必须选择性能更好的稳压芯片。

经综合考虑,本电路采用LM1117-3.3和LM2940-5电源部分的核心芯片。电池电源经过LM2940-5降到5V后在输入LM1117-3.3稳压为3.3V。由于电机部分电流较大,故在飞控电路部分加入了过流保护,使用500mA的保险丝。


编者结语
本设计是基于STM32F4的四轴航拍平台。以STM32F407为控制核心,四轴飞行器为载体,辅以云台的航拍系统。硬件上由飞控电路,电源管理等系统组成。其具有灵活轻盈,延展性,适应性强好等特点。在实际应用方面,四轴飞行器可以在复杂、危险的环境下可以完成特定的飞行任务,也可以用于监控交通,环境等。
【文章转载自网络,版权归原作者所有,若有侵权请联系删除】








 热门文章
热门文章