×


摘 要: 移动机器人路径规划可分为两种类型:(1)全局路径规划;(2)局部路径规划。本文分析了Kohonen神经网络算法及其识别机理,提出了Kohonen神经网络和BP神经网络结合起来进行路径规划的方法,给出了具体的算法,探讨了在神经网络技术中引入学习机制的特点。
1 引言
随着智能控制理论与方法的迅速发展,智能方法在移动机器人路径规划中得到了广泛应用。目前主要存在的智能导航算法主要有模糊算法、神经网络算法、模糊神经网络、遗传算法和进化神经网络等。根据机器人对环境信息掌握的程度, 可分为两种类型: (1)全局路径规划: 指根据先验环境模型找出从起始点到目标点的可行或路径, 环境信息大多是静止障碍; (2) 局部路径规划:工作环境是未知和部分未知, 障碍物的尺寸、形状和位置等信息必须通过传感器获得, 再实时做出决策。本文借鉴人脑从粗分到细分的思想, 将无师学习的自组织神经网络和有师学习的多层前馈神经网络相结合, 在二维的环境中对机器人进行全局路径规划和局部路径规划。首先分析了Kohonen 神经网络算法及其识别机理,对机器人所处环境进行识别作出全局规划,再利用在线得到的局部环境信息, 在尽可能短的时间内,避开出现的未知障碍物。避碰规划也就是局部规划,它是感知空间到行动空间的一种映射。
映射关系可以用不同的方法来实现,这里采用有师学习的BP 算法。实验表明, 采用该方法进行路径规划后,在机器人路径的合理性、执行任务的准确性和工作效率等方面得到了大幅度的改善, 同时也在很大程度上降低了能量损耗。
2 Kohonen神经网络在全局路径规划中的应用
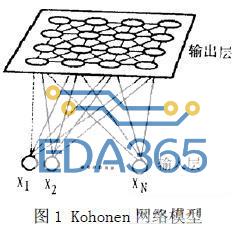
Kohonen 神经网络是一个自组织神经网络,其学习的结果能体现出输入样本的分布情况,从而对输入样本实现数据压缩。基于网络的这些特性, 可采用Kohonen 神经元的权向量来表示自由空间,其方法是在自由空间中随机地选取坐标点(可由传感器获得)作为网络输入,神经网络通过对大量的输入样本的学习,其神经元就会体现出一定的分布形式。学习过程如下:开始时网络的权值随机地赋值,每个神经元能限度地表示一定的自由空间。神经元权向量的生成树可以表示出自由空间的基本框架。网络学习的邻域可以动态地定义成矩形、多边形。神经元数量的选取取决于环境的复杂度,如果神经元的数量太少,它们就不能覆盖整个空间,结果会导致节点穿过障碍物区域。如果节点的数量太大,节点就会表示更多的区域,也就得不到距障碍物的距离。在这种情况下,节点是对整个自由空间的学习,而不是学习框架空间。节点的数量可以动态地定义,在每个学习阶段的结束,机器人会检查所有的路径,如检测到路径上有障碍物,就意味着没有足够的节点来覆盖整个自由空间,需要增加网络节点来重新学习。所以为了收敛于框架表示,应该采用较少的网络节点开始学习,逐步增加其数量。这里采用二维结构表示。Kohonen 模型为两层网络(结构如图1 所示) : 输入层接收输入信号模式, 神经元个数与输入模式的特征数对应; 输出层神经元又称为映射神经元。 Kohonen 网络的输入神经元和输出神经元之间为全连接, 其连接强度由权值控制, 网络的自组织过程就是根据输入信号模式动态地调整权值的过程。算法如下:



3 多层前馈神经网络在局部规划中的应用
Kohonen 神经网络对环境信息进行了分类,得出输入样本的分布情况,即障碍物的位置信息及机器人相对于障碍物的位置信息,但由于受到动态环境的影响(例如动态障碍物),机器人很可能偏离全局路径,这时就需要根据传感器获得的信息,利用上一节的算法结果结合BP 神经网络对机器人路径进行细化。才能通过这个样本集训练出一个好的神经网络来完成交给它的路径规划任务.这里选择已知类别的训练样本集T,用它们作为输入信号模式来训练BP 网络,算法收敛后,根据这些已知类别的环境样本可以得出一路径,步骤如下:

BP 神经网络的学习样本确定如下:学习样本表示障碍物的位置信息及机器人相对于障碍物的位置信息,通过Kohonen网络对机器人的工作空间进行划分,才能通过这个样本集训练出一个好的神经网络来完成交给它的路径规划任务.
4 结论
本文对神经网络用于机器人路径规划进行一些探索和研究,按上述方法在计算机上模拟,所述算法是正确有效的。而且这两种神经网络结合特别适应于机器人控制。它具有以下显著特点:
(1) 由于神经网络可以通过若干实例学习实现网络参数, 而不需要被控对象的数学模型, 也不需要人事先为它设计好控制算法。
(2) 神经网络具有并行处理信息的能力, 所以它能同时将输入的m 维向量变换成满足要求的n 维向量。因此, 可以有效地处理机器人的视觉、听觉等需复杂计算的信息。
(3) 神经网络对外界环境参数的变化具有一定的适应性, 其适用范围之大是其它自适应控制系统所无法比拟的。
(4) 神经网络具有泛化能力, 它能够处理那些未经训练过的数据, 而获得相应于这些数据的合适的解答。
该算法既适用于机器人栅格空间内的路径规划,也适用于二维点机器人工作空间内的路径规划. 因而该方法具有广阔的应用前景.
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 基于MC68HC08单片机和L293D集成电路实现机器人追跑系统的设计
基于MC68HC08单片机和L293D集成电路实现机器人追跑系统的设计






 APP下载
APP下载 登录
登录







