×


图1给出了在数字PID控制下伺服电机的动态速度特性。设计数字PID控制器后,做了一系列实验。图1是电机在数字PID控制下不同设定速度的阶跃响应。其中,曲线a表示电机空载情况下的阶跃响应;曲线b表示电机长时间运行后温度上升的情况下的阶跃响应;曲线c表示当电机加上3Kgf·cm的负载(60%的额定负载)时,电机的阶跃响应曲线。由图1可以看出,只有在电机的速度设定为100rpm时,数字PID控制器的效果较好,不管在哪种情况下,超调量均小于7%,而在50rpm和140rpm的设定速度下,超调量均大于10%。另外在设定速度为100rpm时,电机阶跃响应的上升时间和调整时间均比其他的设定速度下电机阶跃响应的上升时间和调整时间小。但是随着电机温度上升或加上负载,PID控制器的控制品质相对下降,超调量增大同时调整时间变长。这是因为数字PID控制器的参数是在电机空载,设定速度为100rpm的情况下调整的,所以在这种情况下PID控制器的控制品质相对较好。而当电机设定速度变化或电机带负载运行或温度变化时,由于电机的特性随电机带载情况或电机温度的变化而改变,因此电机的工作点发生漂移,而PID控制器的参数无法跟着改变,从而控制品质相对下降。
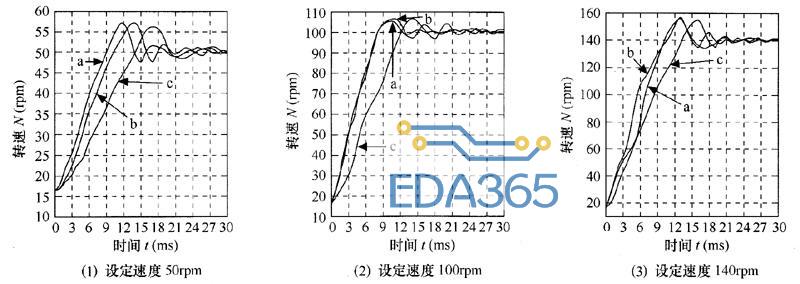
图1 在数字PID控制下不同设定速度的阶跃响应
电机在PID控制下无法完全消除静差,这是因为电机本身的时间常数小,动态响应快,惯性小,容易引人干扰,而PID控制中的微分环节(D)虽然能改善系统的动态特性,加快系统响应,降低超调,但是它也使系统的抗干扰能力下降,所以电机在PID控制下进人稳态后,由于外界干扰的存在,使得电机总是存在略微的抖动。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 电机磁路中的5大定律
电机磁路中的5大定律







 APP下载
APP下载 登录
登录







