×


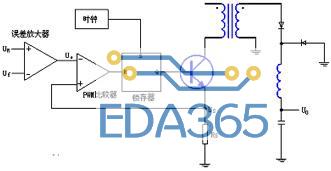
双极性控制系统的实现,是在双模速度控制系统的基础上附加双极性控制信号产生电路。无刷直流电机绕组的自同步换相仍然由MC33035完成,但不再使用MC33035的PWM调制电路,通过将其Ein引脚接4.1V以上电压可使其输出占空比为100%。向QU和QD输出双极性控制信号的双极性控制电路原理框图如图1所示。

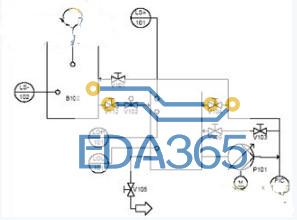
其中脉冲生成电路主要由TL494构成,驱动电路使用的是IR2110,光耦隔离电路使用的高速单路光耦芯片6N137,电流检测电路则使用的是响应速度更快更的霍尔电流传感器LA28-NP。为提高双极性功放电路的响应速度,在控制回路中加人PD环节,它的作用相当于在电流闭环控制系统中加人一个超前校正环节。通过在电流闭环控制回路中加上一个超前校正环节,可以改善由于惯性环节对控制系统的影响,从而提高控制系统的性能。图2所示为加人PD超前校正环节的PWM开关功放。

其中,(Kp+KDs)为PD超前校正环节的传递函数,K/(1+Ts)为功放的传递函数,Kui为电流互感器的比例增益。
在不加PD超前校正环节时,电流控制系统的传递函数为

时间常数为
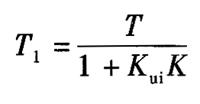
在控制系统中加人PD超前校正环节时,电流控制系统的传递函数为
时间常数为

适当选取KD和KP,就可以减小时间常数T1,使T2远远小于T1。时间常数大,必然会使控制系统产生延迟,因此通过加人超前校正环节,可以解决这个问题。另外,超前校正环节中的微分控制项能够反应输入信号的变化趋势,产生有效的早期修正信号,因此功放可以很好地跟随快速变化的交流,反映在功放性能指标上就是延迟时间短。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 SAP:智造升级关键--[从设计到运维"全流程连接
SAP:智造升级关键--[从设计到运维"全流程连接





 APP下载
APP下载 登录
登录







