APP下载
APP下载 登录
登录







摘要:分析了伺服系统中位置环和电子齿轮的工作原理,同时介绍了一种位置环和电子齿轮的数字实现方法。最后通过实验验证了该设计的可行性。
关键词:伺服系统;位置环;电子齿轮
0 引言
随着电力电子和数字控制技术的发展,越来越多的控制系统采用数字化的控制方式。在目前广泛应用于数控车床、纺织机械领域的伺服系统中,采用全数字化的控制方式已是大势所趋。数字化控制与模拟控制相比不仅具有控制方便,性能稳定,成本低廉等优点,同时也为伺服系统实现网络化,智能化控制开辟了发展空间。全数字控制的伺服系统不仅可以方便地实现电机控制,同时通过软件的编程可以实现多种附加功能,使得伺服系统更为人性化,智能化,这也正是模拟控制所不能达到的。
目前,伺服系统主要用于位置控制,诸如数控车床、电梯等领域,在这些应用场合中,无法通过速度控制来实现系统的精确定位,因此必须引入位置控制方式。在伺服系统中一般采用光电码盘作为位置反馈信号,根据光电码盘在电机转过一圈时产生的脉冲数来对电机进行精确的定位。在实际应用中,电机与其它机械?置采用齿轮的连接方式,一旦固定连接后,电机每转一圈产生的机械轴位移量一定。并且,在伺服控制系统中,位置控制通常由上位控制器产生一定频率和个数的脉冲来决定电机的转速和转过的角度,当指令脉冲当量和位置反馈脉冲当量不一致时,就必须采用电子齿轮的方法来进行调节。本文针对永磁同步电机的伺服系统,对其位置环和电子齿***能进行了数字化设计,最后通过定位实验证明设计的合理性。
1 位置环的设计
作为伺服定位系统,在定位控制时,必须满足以下3方面的要求:
——定位精度,要求系统稳态误差为零;
——定位速度,要求系统有尽可能高的动态响应速度;
——要求系统位置响应无超调。
在实际应用中位置环通常设计成比例控制环节,通过调节比例增益,可以保证系统对位置响应的无超调,但通常这样会降低系统的动态响应速度。另外,为了使伺服系统获得高的定位精度,通常要求上位控制器对给定位置和实际位置进行误差的累计,并且要求以一定的控制算法进行补偿。另外一种方法是把位置环设计成比例积分环节,通过对位置误差的积分来保证系统的定位精度,这使上位控制器免除了对位置误差的累计,降低了控制复杂度。但这和采用比例调节的位置控制器一样,在位置响应无超调的同时,降低了系统的动态响应性能。本文把位置环设计成比例控制器,并且通过一个误差累加器对位置误差进行累计,从而保证定位精度,同时通过分析位置环的闭环传递函数来说明比例系数的取值。
图1是位置伺服系统的控制框图,图中R(s)代表相应的指令脉冲输入,C(s)代表电机相应转过的位置。其中当速度调节器采用PI控制时,在位置环的截止频率远小于速度环的截至频率时,速度环的闭环传递函数可以等效为一个惯性环节,即G2(s)=Kv/(Tvs+1),电机等效为一个积分环节,即G3(s)=Km/s。下面先来分析位置环设计成比例控制时的情况,此时G1(s)=Kc,则系统的闭环传递函数为
H(s)=
(1)
式中:K=KcKvKm。

图1 位置伺服系统控制框图
从开环传递函数看,系统属于I型系统,对斜坡函数和抛物线函数的输入都存在稳态误差,而目前在伺服系统中应用最为广泛的指数函数,可以近似等效为斜坡函数,因此也存在一定的稳态误差。这时要获得较高的定位精度,通常需要上位控制器不断地对位置误差信号进行累计,并以一定的控制算法去进行补偿。另外,由于系统要求位置响应无超调,因此要求阻尼比ξ>=1,此时有
Kc=
(2)
因此在满足位置无超调的调节下,为了获得尽可能快的动态响应,位置环比例系数应尽可能大。
2 位置环的软件实现
本文中伺服系统的位置信号由上位控制器的指令脉冲决定,其格式为脉冲序列+方向信号。DSP控制系统通过判断方向信号来获得电机的给定转向,脉冲序列中的脉冲频率决定电机的转速,累计的脉冲个数决定电机转过的角度。因此在位置环的软件实现时,需要对输出脉冲和反馈脉冲的误差进行累计。并且由于DSP字长的限制,当指令脉冲频率较大且电机响应速度跟不上时,需要考虑误差脉冲的溢出情况。图2是整个伺服系统位置环的控制框图。
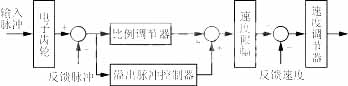
图2 伺服位置环的控制框图
位置调节器相当于一个带比例增益的累加器,对输出脉冲的误差进行累加,具体的算法如下:
R(KT)=KcΔS=Kc
〔DT3(iT)Kg-DT2(iT)〕(3)
式中:ΔS为累计的误差脉冲个数;
T为采样周期;
DT3为每个采样周期内获得的指令脉冲个数;
Kg为电子齿轮系数;
DT2为每个采样周期内反馈脉冲的个数。
溢出脉冲控制器对误差ΔS进行溢出判断,这里考虑到DSP字长的位数(字长为16位),当误差值ΔS>214时即为溢出,此时应设定相应的滞留脉冲控制器,一旦出现脉冲溢出现象,便控制位置环输出最大值,即给定最高转速。位置环的输出经过速度限幅后进入速度控制器。
当伺服系统的跟踪速度由输入脉冲的频率决定时,误差ΔS的值为一定值,此时输入脉冲和反馈脉冲的动态平衡方程如下:
DT3(KT)Kg=DT2(KT)(4)
当输入脉冲的频率不断变化时,则伺服系统的跟踪速度不断变换,此时误差ΔS的值不断变化,并且最后把误差ΔS里的滞留脉冲全部输出,从而实现无误差定位。








 热门文章
热门文章