×


吊具本身由机架(兼做y向导轨)、y向电机、y向丝杠、中间滑板组件(含x向导轨)、x向电机、x向丝杠、吊耳组件(4个)、手轮(4个)、吊环组件、吊索等部分组成。
倾斜传感器安装在机架上,传感器的工作方向分别与吊具的x、y方向平行,系统上电后,系统控制器读取倾斜传感器测出的机架倾斜数据(传感器的俯仰角和横滚角的数据分别代表吊具在x、y向的机架倾斜状况),当测出的数据需要吊索沿x方向移动时,系统控制器根据吊索的当前位置和需要的位移量,计算出对应的速度和方向的控制信号,x向电机驱动电路根据系统控制器输出的控制信号,以合适的电机轴旋转方向和转速启动x向电机运转,电机旋转x向丝杠带动吊环组件完成指定幅度的移动;当需要吊索沿y方向移动时,y向电机驱动电路根据系统控制器输出的控制信号以合适的电机轴旋转方向和合适的转速启动y向电机,电机旋转y向丝杠带动中间滑板组件完成指定幅度的移动。
在吊具运行状态下,x,y向的控制过程是同时且连续进行的,直至吊具调平。
转动手轮,可以带动小丝杠调节滑块在x轴方向上的位置,以适应不同大小的被吊件。
[page]
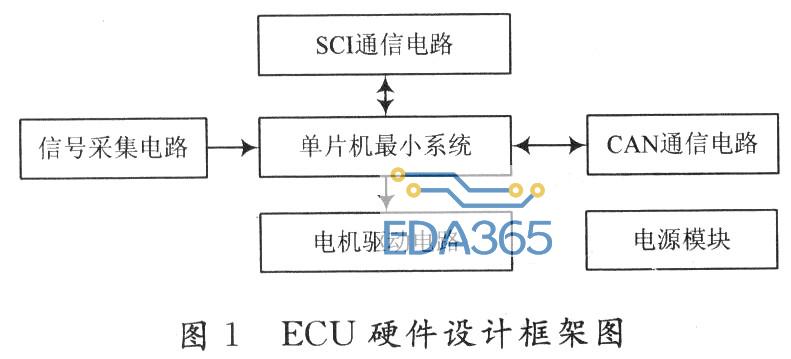
检测部分:主要包括倾角和接近传感器等硬件。其中前者用于获得吊具的俯仰角和横滚角并传送给SP2539的子串口,为下位机判断电机转动方向,计算移动行程提供依据。后者分为软件停机传感器组和机械断电传感器组,采用双重制动策略,保障吊具在使用过程中平稳调平和安全使用。
控制部分:单片机嵌入式系统是控制机构的核心部件,首先接收检测部分的输出值,包括吊具的实时姿态、软件停机传感器组状态,同时调用子程序,处理输入信号并给出动作信号给1、2号变频器,使x,y向电机遵循指令进行动作。最后,单片机还需要和上位机设备进行交流,方便操作人员随时掌握系统的状态。
通信部分:这部分解决单片机分别与检测机构、上位机以及执行机构的信息传输。具体的讲,主要是指单片机与倾角和接近传感器、上位机调平控制指令、1、2号变频器输出频率、角度显示以及SP2539串口扩展系统之间的信息传输。
执行部分:接收单片机的输出信号,并按照上位机自动、手动调平指令调节1、2号变频器输出,从而驱动x、y向电机转动方向,促使主吊点偏移完成调平工作。无线组件将上位机和下位机无缝连接,使得上位机的控制和数据获取更加实时。
3 吊具结构及承重系统设计
3.1 吊环
考虑吊具自身重量,并考虑起吊过程的冲击加速度,根据GB825—88,选择螺钉GB 825 M36,垂直悬吊2.3t。
3.2 框架
为了足够的安全裕度,涵盖考虑最不利情形:一端固支的水平矩形等截面悬臂梁,自由端受重力10 000/2=5000 N;自重加其它零件重量4 000 N偏于安全地视为作用于悬臂梁悬出端。矩形高为100 mm,宽为68 mm;
因此,各种低碳钢均满足要求。
3.3 电机
选用YVP100L2—4变频电机,最高转速5 000 rpm,多级可调。额定功率3 kW,额定扭矩19 Nm。不使用减速机,螺距为3mm,当电机转速为960 rpm时,每秒钟吊环移动48 mm。这个速度可以看做吊具工作时的最高速度。
电机功率=吊具上升速度×(重力加速度+上升加速度)×(被吊质量+设备质量)/机械效率=0.05×(9.8+0.1)×(1 000+400)/0.22=3 kW上述式子是关于吊具彻底歪斜这种最不利情况的,裕度过大。电机功率选国标系列值3 kW。
3.4 螺纹传动机构
螺牙强度能承受(1 000+400)×9.8N的轴向力(吊具彻底歪斜,这是最不利的情况)选用梯形螺纹。因为矩形螺纹运动精度高,成本高。
根据耐磨性初选中径,梯形螺纹:
其中,[p]=18MPa,ψ=H/d=2.5,Q=14 000 N,
得到d2=11.5 mm。为了更好的刚度,选d=32 mm,螺距t=3 mm。
[page]
螺母螺纹牙强度应满足:
满足要求。另外,由于施加轴向力的结构不允许径向位移,所以实际的稳定性安全系数还会高很多;其次,使用中也没有整个吊具倾斜90度的情况。
4 小结
本文对吊具的机械结构的设计进行了介绍,并说明了系统工作原理。对吊具结构及承重设计、动力系统设计给出了详细计算过程。本设计已经获得了国家专利的授权。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 Buck直流变换器的滑模变结构控制研究
Buck直流变换器的滑模变结构控制研究





 APP下载
APP下载 登录
登录







