×


1 /*-----------------------------------
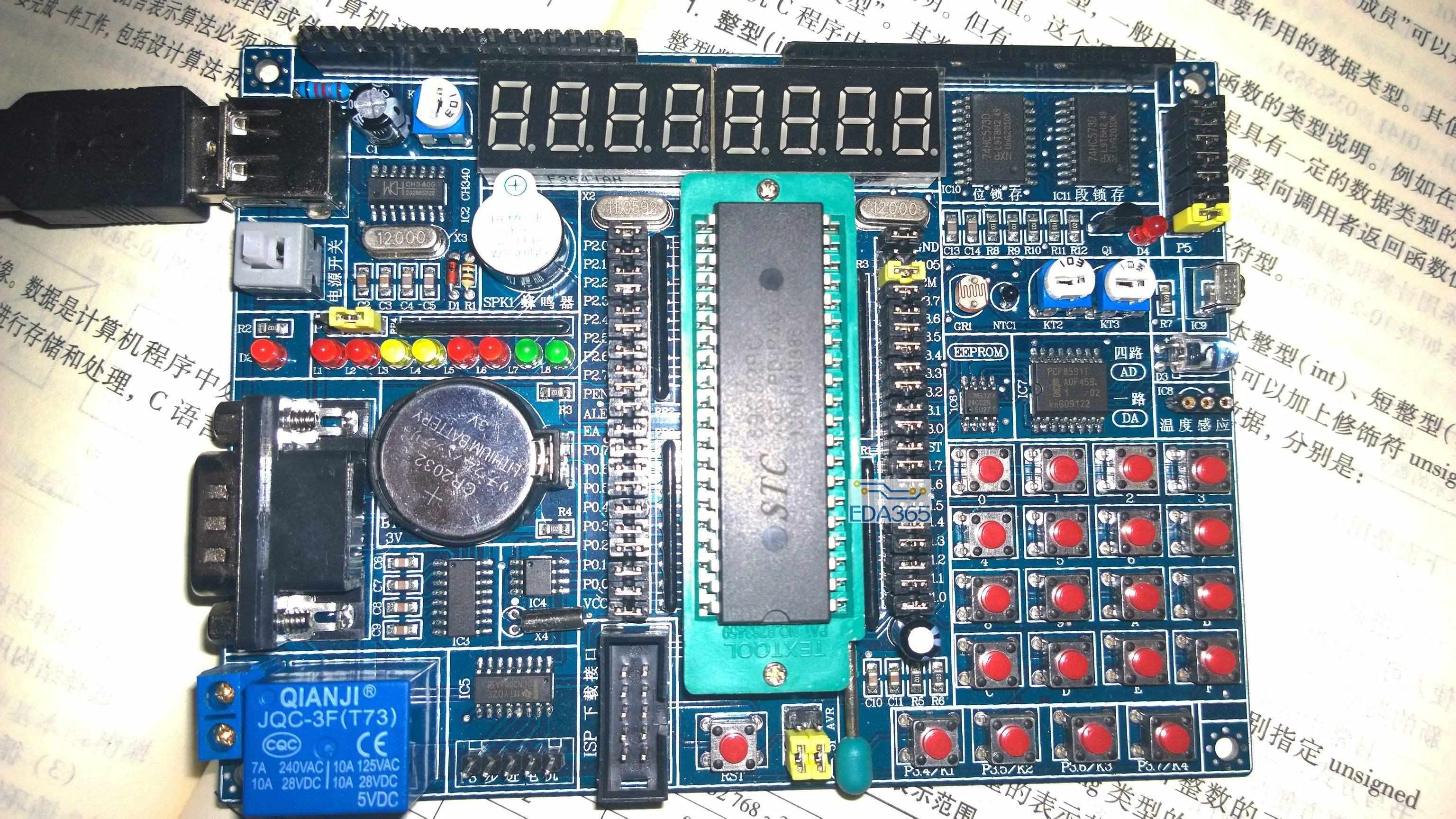
2 多功能下位机
3 STC89C52RC 11.0592MHz
4
5 -----------------------------------*/
6 #include
7 #include
8
9 char code huanhang[3]={0x0d,0x0a,0}; // "\r\n"
10 //-----------------普通输出端口---------------//
11 sbit LED0=P1^0;
12 sbit LED1=P1^1;
13 sbit LED2=P1^2;
14 sbit jdq_00=P1^3;
15 sbit fmq_00=P2^5;
16
17 /**********DS18B20***********/
18 bit Temp_Symbol=0;
19 //温度传感_0---------
20 sbit DQ=P2^6;
21 //------------------串口通信协议-----------------//
22 /*
23 客户端数据包格式解释(长度恒为15):
24 例如:A01_fmq_01Off___#
25 A--------数据包的开始标记(可以为A到Z)
26 01-----设备代号
27 fmq_01Off___--------指令(长度恒为10),指令的前4个人字符是指令头部,指令的后6个字符是指令尾部
28 #---------数据包的结束标记
29
30 服务器端数据包格式解释(长度恒为15):
31 例如:A02_SenT010250#
32 A--------数据包的开始标记(可以为A到Z)
33 02-----设备代号
34 SenT010250--------指令(长度恒为10),指令的前4个人字符是指令头部,指令的后6个字符是指令尾部
35 #---------数据包的结束标记
36 */
37 char buf_string[16]; //定义数据包长度为15个字符
38 #define deviceID_1Bit '0' //用于串口通信时,定义本地设备ID的第1位
39 #define deviceID_2Bit '2' //用于串口通信时,定义本地设备ID的第2位
40 #define datapackage_headflag 'A' //用于串口通信时,定义数据包头部的验证标记
41
42 char DataPackage_DS18B20[16]={datapackage_headflag,deviceID_1Bit,deviceID_2Bit,'_','S','e','n','T','_','_','_','_','_','_','#'};
43 char HeartBeat[16]={datapackage_headflag,deviceID_1Bit,deviceID_2Bit,'_','B','e','a','t','_','_','_','_','_','_','#'};
44 //----------------------------------------------//
45
46 /**************************
47 辅助函数
48 ***************************/
49 //改变要发送的DS18B20数据包
50 void Change_DataPackage_DS18B20(int DS18B20_Value)
51 {
52 if(Temp_Symbol)
53 {
54 DataPackage_DS18B20[10] = '-';
55 }
56 else
57 {
58 DataPackage_DS18B20[10] = '0';
59 }
60 DataPackage_DS18B20[11] = 0x30+DS18B20_Value % 10000 / 1000;
61 DataPackage_DS18B20[12] = 0x30+DS18B20_Value % 1000 / 100;
62 DataPackage_DS18B20[13] = 0x30+DS18B20_Value % 100 / 10;
63 }
64 /********************************
65 DS18B20
66 若没有效果,意味着延时可能有问题
67 测温范围 -55℃~+125℃
68
69 单线通信接口
70 1)边沿=触发
71 2)电平持续时间=信息
72 3)一字节的电平组合=指令
73 ********************************/
74 //延时------
75 void delay_DS18B20(unsigned int t)
76 {
77 for (;t>0;t--);
78 }
79 //复位,使得从设备可以接收指令-----------
80 void Reset_DS18B20()
81 {
82 char presence=1;
83 while(presence)
84 {
85 while(presence)
86 {
87 DQ=1;_nop_();_nop_();//从高拉倒低
88 DQ=0;
89 delay_DS18B20(50); //550 us
90 DQ=1;
91 delay_DS18B20(6); //66 us
92 presence=DQ; //presence=0 复位成功,继续下一步
93 }
94 delay_DS18B20(45); //延时500 us
95 presence=~DQ;
96 }
97 DQ=1; //拉高电平
98 }
99 //写DS一个字节数据----------
100 void WriteByte_DS18B20(unsigned char val)
101 {
102 unsigned char i;
103 for(i=8;i>0;i--)
104 {
105 DQ=1;_nop_();_nop_(); //从高拉倒低
106 DQ=0;_nop_();_nop_();_nop_();_nop_(); //5 us
107 DQ=val&0x01; //最低位移出
108 delay_DS18B20(6); //66 us
109 val=val/2; //右移1位
110 }
111 DQ=1;
112 delay_DS18B20(1);
113 }
114 //读DS一个字节数据---------
115 unsigned char ReadByte_DS18B20()
116 {
117 unsigned char i;
118 unsigned char byte=0;
119 for(i=8;i>0;i--)
120 {
121 DQ=1;_nop_();_nop_();
122 byte>>=1;
123 DQ=0;_nop_();_nop_();_nop_();_nop_(); //4 us
124 DQ=1;_nop_();_nop_();_nop_();_nop_(); //4 us
125 if(DQ)byte|=0x80;
126 delay_DS18B20(6); //66 us
127 }
128 DQ=1;
129 return(byte);
130 }
131 //让DS18B20测量一次温度,并将测量结果存放在其内部RAM----------
132 void MeasureTemp_DS18B20()
133 {
134 Reset_DS18B20();
135 delay_DS18B20(200);
136 WriteByte_DS18B20(0xcc); //发送无条件选中命令,选中总线上仅有的DS18B20从设备
137 WriteByte_DS18B20(0x44); //温度转换命令
138
139 }
140 //向DS18B20请求读取温度值--------------
141 void ReadTemperature_DS18B20()
142 {
143 Reset_DS18B20();
144 delay_DS18B20(1);
145 WriteByte_DS18B20(0xcc); //发送无条件选中命令,选中总线上仅有的DS18B20从设备
146 WriteByte_DS18B20(0xbe); //发送读取温度命令
147 }
148 //获取并返回DS18B20内部温度测量值--------
149 int GetTemperature_DS18B20()
150 {
151 int temp=0;
152 unsigned char temperature_H,temperature_L; //需要连续读取2个字节数据并进行处理,才能得出一次温度值
153 MeasureTemp_DS18B20(); //先写入转换命令
154 ReadTemperature_DS18B20(); //然后等待转换完后发送读取温度命令
155 temperature_L=ReadByte_DS18B20(); //读取温度值共16位,先读低字节
156 temperature_H=ReadByte_DS18B20(); //再读高字节
157 temp=temperature_H;
158 temp<<=8;
159 temp|=temperature_L;
160 if(temp<0) //当温度值为负数(高5位为符号位)
161 {
162 temp=~temp;
163 temp=temp+1;
164 temp=0.0625*temp*100+0.5; //temp*100 意味着取2位小数, +0.5 意味着四舍五入
165 Temp_Symbol=1;
166 }
167 else //当温度值为正数
168 {
169 temp=0.0625*temp*100+0.5;
170 Temp_Symbol=0;
171 }
172 return temp;
173 }
174 /*******************************
175 串口通信
176 MCU:89C52RC 11.0592MHz
177
178 //11.0592MHz 0xd0 1200bps
179 //12MHz 0xcc 1200bps
180 //11.0592MHz 0xfa 9600bps
181 //0xf4 11.0592MHz 0xf3 12MHz 4800bps
182 //均在SMOD=1的情况下(波特率倍增模式)
183 *******************************/
184 //串口发送函数
185 void PutString(unsigned char *TXStr)
186 {
187 ES=0;
188 while(*TXStr!=0)
189 {
190 SBUF=*TXStr;
191 while(TI==0);
192 TI=0;
193 TXStr++;
194 }
195 ES=1;
196 }
197 //串口接收函数
198 bit ReceiveString()
199 {
200 char * RecStr=buf_string;
201 char num=0;
202 unsigned char count=0;
203 loop:
204 *RecStr=SBUF;
205 count=0;
206 RI=0;
207 if(num<14) //数据包长度为15个字符,尝试连续接收15个字符
208 {
209 num++;
210 RecStr++;
211 while(!RI)
212 {
213 count++;
214 if(count>130)return 0; //接收数据等待延迟,等待时间太久会导致CPU运算闲置,太短会出现"数据包被分割",默认count=130
215 }
216 goto loop;
217 }
218 return 1;
219 }
220 //定时器1用作波特率发生器
221 void Init_USART()
222 {
223 SCON=0x50; //串口方式1,使能接收
224 TMOD|=0x20; //定时器1工作方式2(8位自动重装初值)
225 TMOD&=~0x10;
226 TH1=0xfa; //9600bps
227 TL1=0xfa;
228 PCON|=0x80; //SMOD=1
229 TR1=1;
230 TI=0;
231 RI=0;
232 //PS=1; //提高串口中断优先级
233 ES=1; //开启串口中断使能
234 }
235 //比较指令头部
236 bit CompareCMD_head(char CMD_head[])
237 {
238 unsigned char CharNum;
239 for(CharNum=0;CharNum<4;CharNum++) //指令长度为10个字符
240 {
241 if(!(buf_string[CharNum+4]==CMD_head[CharNum]))
242 {
243 return 0; //指令头部匹配失败
244 }
245 }
246 return 1; //指令头部匹配成功
247 }
248 //比较指令尾部(start:从哪里开始比较,quality:比较多少个字符,CMD_tail[]:要比较的字符串)
249 bit CompareCMD_tail(unsigned char start,unsigned char quality,char CMD_tail[])
250 {
251 unsigned char CharNum;
252 for(CharNum=0;CharNum
253 {
254 if(!(buf_string[start+CharNum]==CMD_tail[CharNum]))
255 {
256 return 0;
257 }
258 }
259 return 1;
260 }
261 //处理串口接收数据包函数(成功处理数据包则返回1,否则返回0)
262 bit Deal_UART_RecData()
263 {
264 //PutString(buf_string);
265 if(buf_string[0]==datapackage_headflag&&buf_string[14]=='#') //进行数据包头尾标记验证
266 {
267 switch(buf_string[1]) //识别发送者ID的第1位数字
268 {
269 case '0':
270 switch(buf_string[2]) //识别发送者ID的第2位数字
271 {
272 case '3':
273 if(CompareCMD_head("Ligt")) //判断指令头部是否为"Ligt"
274 {
275 //下面是指令尾部分析
276 switch(buf_string[8])
277 {
278 case '0':
279 switch(buf_string[9])
280 {
281 case '0':
282 if(CompareCMD_tail(10,3,"Off")) //A03_Ligt01Off_#
283 {
284 LED0=1;
285 return 1;
286 }
287 if(CompareCMD_tail(10,3,"On_"))
288 {
289 LED0=0;
290 return 1;
291 }
292 return 0;
293 case '1':
294 if(CompareCMD_tail(10,3,"Off")) //A03_Ligt01Off_#
295 {
296 LED1=1;
297 return 1;
298 }
299 if(CompareCMD_tail(10,3,"On_"))
300 {
301 LED1=0;
302 return 1;
303 }
304 return 0;
305 case '2':
306 if(CompareCMD_tail(10,3,"Off")) //A03_Ligt01Off_#
307 {
308 LED2=1;
309 return 1;
310 }
311 if(CompareCMD_tail(10,3,"On_"))
312 {
313 LED2=0;
314 return 1;
315 }
316 return 0;
317 default:
318 return 0;
319 }
320 default:
321 return 0;
322 }
323 }
324 if(CompareCMD_head("SenT"))
325 {
326 //下面是指令尾部分析
327 DataPackage_DS18B20[8]=buf_string[8];
328 DataPackage_DS18B20[9]=buf_string[9];
329 switch(buf_string[8])
330 {
331 case '0':
332 switch(buf_string[9])
333 {
334 case '0':
335 Change_DataPackage_DS18B20(GetTemperature_DS18B20());
336 PutString(DataPackage_DS18B20);
337 return 1;
338 default:
339 return 0;
340 }
341 default:
342 return 0;
343 }
344
345 }
346 if(CompareCMD_head("jdq_"))
347 {
348 //下面是指令尾部分析
349 switch(buf_string[8])
350 {
351 case '0':
352 switch(buf_string[9])
353 {
354 case '0':
355 if(CompareCMD_tail(10,3,"Off"))
356 {
357 jdq_00=1;
358 return 1;
359 }
360 if(CompareCMD_tail(10,3,"On_"))
361 {
362 jdq_00=0;
363 return 1;
364 }
365
366 return 0;
367 default:
368 return 0;
369 }
370 default:
371 return 0;
372 }
373 }
374 if(CompareCMD_head("fmq_"))
375 {
376 //下面是指令尾部分析
377 switch(buf_string[8])
378 {
379 case '0':
380 switch(buf_string[9])
381 {
382 case '0':
383 if(CompareCMD_tail(10,3,"Off"))
384 {
385 fmq_00=1;
386 return 1;
387 }
388 if(CompareCMD_tail(10,3,"On_"))
389 {
390 fmq_00=0;
391 return 1;
392 }
393
394 return 0;
395 default:
396 return 0;
397 }
398 default:
399 return 0;
400 }
401 }
402 if(CompareCMD_head("Try!"))
403 {
404 PutString(HeartBeat);
405 return 1;
406 }
407
408 return 0;
409
410 default:
411 return 0;
412 }
413 default:
414 return 0;
415 }
416 }
417 return 0;
418 }
419 /************************
420 中断函数
421 ************************/
422 //串口中断服务函数-----------
423 void USART() interrupt 4 //标志位TI和RI需要手动复位,TI和RI置位共用一个中断入口
424 {
425 if(ReceiveString())
426 {
427 //数据包长度正确则执行以下代码
428 Deal_UART_RecData();
429 }
430 else
431 {
432 //数据包长度错误则执行以下代码
433 //LED1=~LED1;
434 }
435 RI=0; //接收并处理一次数据后把接收中断标志清除一下,拒绝响应在中断接收忙的时候发来的请求
436 }
437 /***************************
438 主函数
439 ***************************/
440 //空格20H,回车0DH,'\n'对应ASCLL码:0x0a
441 void main()
442 {
443 EA=1;
444 Init_USART();
445 while(1)
446 {
447
448 }
449 }
硬件电路要求不高,准备好一个51最小系统,外加一些自己想要的外围设备,当然最重要的是准备一个透传模块(ESP8266),其电路接法如下:
这个模块具体有什么用呢?
简单来说就是这个模块可以跟单片机进行串口通信,也可以跟其它终端进行socket通信,那么我们现在就是利用其跟手机进行socket通信,接收手机的数据,再把数据发送到单片机,实现手机控制单片机。而手机是以客户端的形式与透传模块ESP8266进行连接,因此我们需要对ESP8266进行简单的配置,才能保证手机能跟ESP8266进行连接,具体做法请自行百度。
请另外观看项目的2个部分:
1)局域网控制系统-上位机-Android手机
2)局域网控制系统-上位机-PC机
让我们从项目,从代码中可以更快地提高自己!
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多






 APP下载
APP下载 登录
登录







