×


;该试验功能是 单片机 复位一次,自动从24C02中读取数据到数码管显示,然后对值加1再写入24C02,最终数码管中的数据就是开机的次数,具有一定的实用意义
;本电路所使用24C02为ATMEL的,或不是该厂的,则烧写时间可能会有差异
;必须调整本程序的DELAY时间
;本实战的目的是让大家进上步熟悉I2C通信的时序,熟悉24CXX的读写,会用软件模拟I2C通信
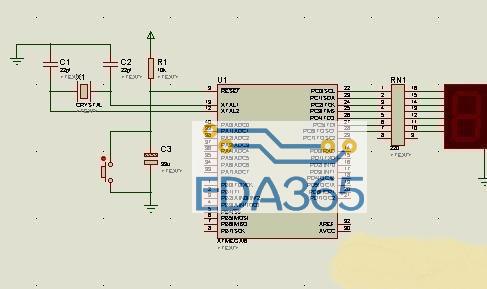
;硬件接法:
;1.24CXX的SDA接877A的RB5口,SCLK接877A的RB4口,WP接地,A0,A1,A2接地
LIST P=16F877A, R=DEC
include "P16F877A.inc"
;***********************************
__CONFIG _DEBUG_OFF&_CP_OFF&_WRT_HALF&_CPD_OFF&_LVP_OFF&_BODEN_OFF&_PWRTE_ON&_WDT_OFF&_XT_OSC;
;************************************ 定义查表偏移量
#define SDA PORTB,5
#define SCLK PORTB,4
;*********************
COUNT EQU 20H
ADDR EQU 21H
DAT EQU 23H
TEMP EQU 24H
;**********************
ORG 000H
NOP ;放置一条ICD必需的空操作指令
GOTO MAIN
ORG 004H
RETURN
ORG 0008H
;******************************************************
TABLE
ADDWF PCL,1 ;地址偏移量加当前PC值
RETLW 0C0H ;0
RETLW 0F9H ;1
RETLW 0A4H ;2
RETLW 0B0H ;3
RETLW 99H ;4
RETLW 92H ;5
RETLW 82H ;6
RETLW 0F8H ;7
RETLW 80H ;8
RETLW 98H ;9
RETLW 00H ;A
RETLW 00H ;B
RETLW 00H ;C
RETLW 00H ;D
RETLW 00H ;E
RETLW 00H ;F
;*******************************************************
MAIN
MOV LW 0FFH
MOV WF PORTC ;数码管先全部熄灭
MOV LW 0FFH
MOV WF PORTA
MOV LW 0FFH
MOV WF PORTB ;SDT,SCLK都为高
BSF STATUS,RP0 ;定义RA口,RC,RB口全部为输出
MOV LW 07H
MOV WF ADCON1 ;设置RA口全部为普通数字IO口
CLRW
MOV WF TRISB ;
MOV WF TRISA
MOV WF TRISC
MOV WF OPTION_REG ;开启RB口内部弱上拉
BCF STATUS,RP0
CLRW ;地址00H
CALL RD24 ;读地址
MOV WF DAT ;读出的值送F1
SUBLW .9 ;若读出的值大于9,则F1送为0,从0开始(因为1位数码管只能显示到0-9)
BC TT2 ;C=0就转TT2
TT1
CLRF DAT
TT2
MOV FW DAT
CALL TABLE ;取显示段码
MOV WF PORTC ;段码送C口
BCF PORTA ,1 ;点亮第一位数码管
INCF DAT ,1 ;每次上电,存入24CXX的00H地址的值加1
CLRW ;地址00H
CALL WT24 ;写24CXX
GOTO $
;****************************
RD24
MOV WF ADDR ;地址暂存于F4中
CALL START24 ;启动I2C
MOV LW 0A0H
CALL SUBS ;写器件地址1010000+最后一位0写操作
MOV FW ADDR ;载入地址
CALL SUBS ;写地址
CALL START24 ;再发开始信号
MOV LW 0A1H ;写器件地址1010000+最后一位1读操作
CALL SUBS
BSF STATUS ,RP0
BSF TRISB ,5 ;设SDA脚为输入,准备读
BCF STATUS ,RP0
MOV LW 08H ;共读8位数据
MOV WF COUNT
RD000
NOP
NOP
NOP
BSF SCLK ;读数据
NOP
BSF STATUS,C
BTFSS SDA
BCF STATUS,C
RLF TEMP ,1
BCF SCLK
DECFSZ COUNT ,1 ;循环读完8位
GOTO RD000
BSF STATUS ,RP0
BCF TRISB ,5 ;恢复SDA脚为输出
BCF STATUS ,RP0
BSF SDA
CALL DELAY2
BSF SCLK
CALL DELAY2
BCF SCLK ;应答毕,SDA置1
CALL STOP ;送停止信号
MOV FW TEMP ;将读的数据送入W中
RETURN
;******************************写入24C02程序
WT24 MOV WF ADDR ; 先将地址暂存于F4
CALL START24 ;开始条件
MOV LW 0A0H
CALL SUBS ;写器件地址1010000+最后一位0写操作
MOV FW ADDR ;载入地址
CALL SUBS ;写地址
MOV FW DAT ;载入数据
CALL SUBS ;写数据
CALL STOP ;停止信号
RETURN
START24
;开始条件
BSF SDA
BSF SCLK
CALL DELAY2
BCF SDA
CALL DELAY2
BCF SCLK
RETURN
STOP
BCF SDA ;停止条件
NOP
NOP
BSF SCLK
CALL DELAY2
BSF SDA
RETURN
SUBS ;写数据
MOV WF TEMP ;将要写的数据存于F2中
MOV LW 08H
MOV WF COUNT ;写8位数据
SH01
RLF TEMP ,1
BSF SDA
BTFSS STATUS ,C
BCF SDA
NOP
BSF SCLK
CALL DELAY2
BCF SCLK
DECFSZ COUNT ,1 ;循环写完8位
GOTO SH01
BSF SDA
NOP
NOP
BSF SCLK
BSF STATUS,RP0
BSF TRISB ,5
BCF STATUS,RP0
REP
BTFSC SDA ;判应答到否,未到则等待
GOTO REP
BCF SCLK
BSF STATUS,RP0
BCF TRISB ,5
BCF STATUS,RP0
RETURN
DELAY2
NOP
NOP
NOP
NOP
RETURN
;********************************************
end ;源程序结束
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 单片机中高阻态的实质及意义
单片机中高阻态的实质及意义





 APP下载
APP下载 登录
登录







