×


异步通信:传输单位是一个字符,两个字符之间时间间隔不固定,时间固定为同步。
通信协议:通信双方共同制定的规则,有数据格式:奇偶校验位、停止位.....,通信流程上的规格.
UART(universal asynchronous receivertransmitter):通用异步收发器,用来串行传输数据,发送时,CPU将数据并行写入UART,UART按照一定格式在一位的数据线上串行发送,接受时,从一位数据线接受串行的数据。
S3c2440有三个独立的uart接口,并且每个uart包括64字节的接受和发送fifo。
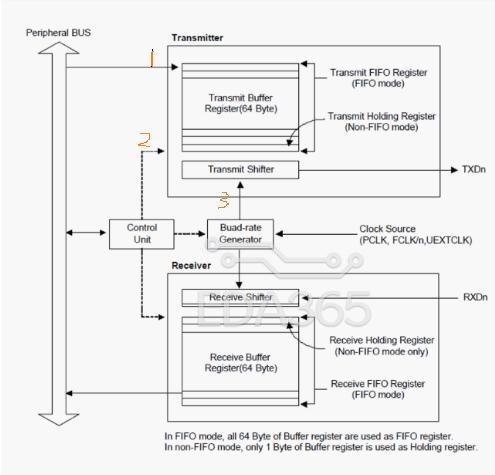
串口基本工作原理:分为发送和接收部分,发送部分:1接口用来接收数据,数据由CPU通过BUS送到uart,首先进入transmitbuffer,然后会自动的把每字节送入transmitshift把8位数据依位移出发送,发送过程受波特率控制每秒发送位数。接收:从数据依位收到放入 receive shift形成一个字节,放入buffer,通过机制(中断)告诉CPU,完成接受。
串口UART程序设计
UART初始化:设置波特率-->设置串口数据传输格式-->选择通道工作模式(DMA,中断......)。
1:通过UART Baud Rate Divisor Register即UBRDIV可以设置UART波特率,波特率的设置依赖一个公式 UBRDIV=(int)(uartclock / (baud rate * 16) ) -1
(uart clock :PCLK or FCLK /n or UEXTCLK)
CPU一工作clock就定下来,设置波特率就是设置UBRDIV。
2:设置传输格式,通过UART LINE CONTROL REGISTER即ULCON,可以设置传输格式。
3:设置通道工作模式:通过UART CONTROL REGISTER,即UCON。
完成初始化后发送数据
把要发送的数据写入UTXHn(4个字节),UART会把它保存到缓冲区,并自动发送。

接收数据:一旦接收到数据之后,如果没有DMA和中断,可以查询UTRSTATn寄存器的第0位,从URXHn寄存器拿数据。

串口发送数据程序:
static void cal_cpu_bus_clk(void);
void Set_Clk(void);
void beep_init(void);
void beep_run(void);
void delay(int times) {
int i,j;
for(i=0;i>12)&0xff, (mpll_val>>4)&0x3f, mpll_val&3); //set the register--rMPLLCON
ChangeClockDivider(key, 12); //the result of rCLKDIVN [0:1:0:1] 3-0 bit
cal_cpu_bus_clk(); //HCLK=100M PCLK=50M
}
/
static void cal_cpu_bus_clk(void)
{
static U32 cpu_freq;
static U32 UPLL;
U32 val;
U8 m, p, s;
val = rMPLLCON;
m = (val>>12)&0xff;
p = (val>>4)&0x3f;
s = val&3;
//(m+8)*FIN*2 不要超出32位数!
FCLK = ((m+8)*(FIN/100)*2)/((p+2)*(1<>1)&3;
p = val&1;
val = rCAMDIVN;
s = val>>8;
switch (m) {
case 0:
HCLK = FCLK;
break;
case 1:
HCLK = FCLK>>1;
break;
case 2:
if(s&2)
HCLK = FCLK>>3;
else
HCLK = FCLK>>2;
break;
case 3:
if(s&1)
HCLK = FCLK/6;
else
HCLK = FCLK/3;
break;
}
if(p)
PCLK = HCLK>>1;
else
PCLK = HCLK;
if(s&0x10)
cpu_freq = HCLK;
else
cpu_freq = FCLK;
val = rUPLLCON;
m = (val>>12)&0xff;
p = (val>>4)&0x3f;
s = val&3;
UPLL = ((m+8)*FIN)/((p+2)*(1<>1):UPLL;
}
void beep_init(void)
{
rGPBCON &= ~(0x3<<0);
rGPBCON |= (0x1<<0);
}
void beep_run(void)
{
rGPBDAT |= (0x1<<0);
delay(5000);
rGPBDAT &= (0x0<<0);
delay(5000);
}
void Uart_Init(int pclk,int baud)
{
int i;
if(pclk == 0)
pclk = PCLK; //串口使用PCLK
rUFCON0 = 0x0; //UART channel 0 FIFO control register, FIFO disable
rUFCON1 = 0x0; //UART channel 1 FIFO control register, FIFO disable
rUFCON2 = 0x0; //UART channel 2 FIFO control register, FIFO disable//关掉fifo
rUMCON0 = 0x0; //UART chaneel 0 MODEM control register, AFC disable
rUMCON1 = 0x0; //UART chaneel 1 MODEM control register, AFC disable rULCON0 = 0x3; //Line control register : Normal,No parity,1 stop,8 bits
rUCON0 = 0x245; // Control register
rUBRDIV0=( (int)(pclk/16./baud+0.5) -1 ); //Baud rate divisior register 0
//UART1
rULCON1 = 0x3;
rUCON1 = 0x245;
rUBRDIV1=( (int)(pclk/16./baud+0.5) -1 );
//UART2
rULCON2 = 0x3;
rUCON2 = 0x245;
rUBRDIV2=( (int)(pclk/16./baud+0.5) -1 );
for(i=0;i<100;i++);
}
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 51单片机CO2检测显示程序解析
51单片机CO2检测显示程序解析










 APP下载
APP下载 登录
登录







