×


特征
双PWM控制器可调
1.9V至5.3V(第1节)
1.6V至3.5V(第2节)
线性辅助驱动器
调节器
电流模式控制
感测电阻器
双同步整流器驱动器
“一次性”功能(仅限L5994A)
可实现96%的效率
50μ12V时为A备用消耗
4.75V至25V工作电源电压
出色的负载瞬态响应
“跳脉冲”功能
输出欠压停机
适应性防射穿
控制
过压/欠压检测
电源良好信号
分离禁用
热关机
应用
笔记本和子笔记本
计算机
1.8V和2.5V输入/输出电源
写字板
互联网设备
说明
该设备提供一个双PWM控制器和一个线性驱动器控制器可以支持完整的高功率移动设备的电源管理效率。

说明(续)
该器件在这两个部分产生可调的调节电压和一个线性调节电压外部双极,如用于PCMCIA应用。辅助线性驱动器能够为12V总线提供高达1A的电源,也可以将其用于调节来自5V总线的2.5V电压。同步整流和脉冲跳跃模式的降压部分优化了整体效率超过宽负载电流范围。这两个高性能PWM输出部分被监控是否存在过电压、欠电压和过电流条件。为每个部分提供一个电源良好信号。检测到故障时,将生成相关的电源良好信号,并执行特定的关机程序用于防止物理损坏和数据损坏。禁用功能允许单独管理输出功率部分,优化待机状态下IC的静态消耗。内部结构是一种电流模式,允许在不损害由于超低感测电阻的效率。当两段中的一段发生短路时,强制欠压停机。驱动器提供了一个自适应的抗交叉传导系统,适用于高输出电流应用
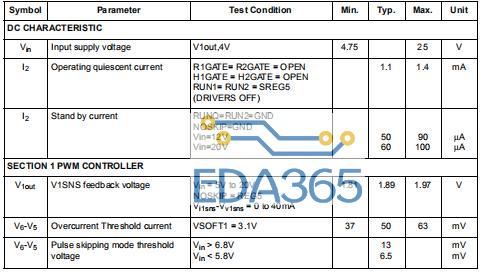
电气特性(Vin=12V;Tj=25°C;Vosc=GND;除非另有规定。)
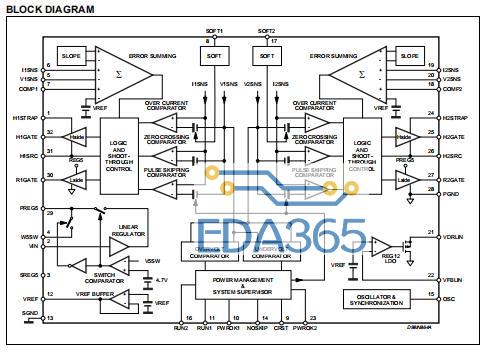
详细功能描述
在设备框图中,可以识别出六个基本功能块
1.9V至5.1V降压PWM开关稳压器(第1节,引脚1、4至8、30至32)
1.66V至3.3V降压PWM开关调节器(第2节,引脚17至20,24至27)
用于外部PNP晶体管的线性调节器驱动器(引脚21、22)
5V低压差线性稳压器(针脚29)
2.5V发电机参考电压
电源管理部分(引脚9至11、14、16)。
芯片通过引脚Vin(2)供电,通常由电池组或AC-DC适配器的输出提供,并且电压范围从5V到25V。设备的偏置电流返回信号接地引脚SGND(13) ,它引用内部逻辑电路。外部MOSFET的驱动器有其单独的电流返回,即电源接地引脚PGND(28)。注意保持信号机接地线路的隔离和电源接地管脚(参见“布局和接地”一节)。两个PWM调节器共用内部振荡器,可编程或通过引脚OSC(15)同步。
PWM调节器
每个PWM调节器包括用于降压DC-DC转换器的控制电路和栅极驱动电路在buck拓扑中采用同步整流和电流模式控制。这两个监管机构是独立的,几乎完全相同。正如方框图中所示,它们只共享振荡器和内部电源与预设输出电压不同。每个转换器可以独立地打开和关闭:RUN1和RUN2是禁用应用低逻辑电平(低于0.8V)时的相关部分,并使其能够以高逻辑电平运行(高于2.4 V)。当两个输入都很低时,设备处于待机状态,其电流消耗大大降低(在整个输入电压范围内小于120mA)。该器件能够以两种不同的方式调节期望的输出电压:经典的PWM操作和脉冲跳过操作(参见相关章节)。
振荡器
振荡器不需要任何外部定时元件,控制PWM开关频率。这可以是200或300 kHz,取决于控制引脚OSC的逻辑状态,也可以由外部振荡器同步。如果OSC引脚接地或连接到引脚PREG5(5V),振荡器工作在200kHz。通过连接OSC引脚至2.5V电压,将选择300 kHz操作。此外,如果引脚OSC与外部信号如图2所示,振荡器将通过其下降沿同步。考虑到振荡器的扩展,230kHz以上的频率可以保证同步。即使最大频率值在实践中是由效率考虑而施加的,也应注意频率增加过多会产生一些问题(噪声、次谐波振荡等),但并不显著外部组件尺寸减小和动态性能更佳。振荡器施加一个时间间隔(300纳秒分钟),在此期间高压侧MOSFET绝对关闭,以给自举电容器充电(参见“MOSFET驱动程序”一节)。这意味着对最高负荷的限制循环(88.5%@fSW=300kHz,92.6%@fSW=200kHz,最坏情况),反过来对最小值施加限制工作输入电压。
PWM操作
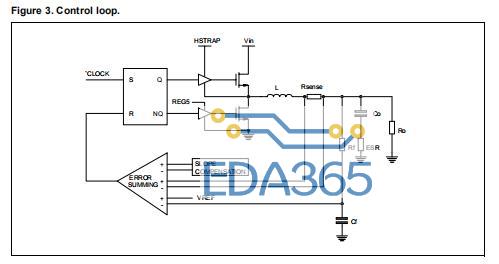
控制回路不采用传统的误差放大器,而是采用误差相加比较器求出参考电压、反馈信号、通过外部感测电阻的电压降和斜率补偿斜坡(以避免占空比大于50%的次谐波振荡)标志。参考图3的示意图,两个控制器的输出锁存器由来自振荡器。这会关闭低侧MOSFET(同步整流器),当低侧栅电压降到0.3V以下以防止交叉传导,打开高压侧,从而允许从输入源和存储在电感器中。通过比较上述信号,误差求和确定输出时刻闩锁要复位。高压侧MOSFET关闭,同步整流器在高压侧MOSFET源上的电压降到2V以下以防止交叉传导,从而使in 导管电流再循环。在任何情况下,高侧mosfet在时钟信号下降沿关闭:这是关税限制在其最大价值的原因。达到的状态保持到下一个振荡器脉冲。在理想斜率补偿假设下,这种控制系统的开环传递函数为:

其中A是误差求和比较器的增益,设计为2。该系统本质上是非常快的,因为它倾向于校正几乎一个周期的输出电压偏差基础。实际上,在线路或负载发生变化的情况下,很少的开关周期足以使瞬态终止。上述操作在特殊或异常情况下被修改。暂时不考虑其他情况(如“保护”一节所述),考虑负载电流是否足够低或在启动时的第一个开关周期内:电感器电流可能变得不连续,因此在启动期间为零每个周期的最后一部分。在这种情况下,“零电流比较器”检测到该事件并关闭同步整流器,避免了电感器电流反转,并在反向偏时再现二极管的自然关断。提高负载效率。两个MOSFET在下一个之前都处于关闭状态振荡器脉冲。
同步整流
同步整流技术在高负载电流下可获得非常高的效率,特别是由于输出电压较低,这一点尤为有利。低侧MOSFET,即同步整流器,选择的导通电阻非常低,因此并联肖特基二极管不导通,除了两个MOSFET都不导电的小时间。其效果是在再循环期间显著降低功率损耗。
尽管肖特基可能看起来是多余的,但它并不是一个需要非常高效率的系统。事实上,它的较低阈值可防止同步整流MOSFET的损耗体二极管在上述死区期间导通。传导损失和反向恢复损失都得到了降低在某些情况下,效率可提高1-2%。此外,一个小的二极管就足够了,因为它可以时间很短。请参阅“电源管理”部分,了解如何使用两个同步整流器来确保零电压在待机状态或过压情况下的输出。跳脉冲操作为了在低负载电流下实现高效率,在这种情况下,调节器改变其工作方式(除非禁用此功能):它们放弃PWM并进入所谓的脉冲跳过模式,在这种模式下每多个振荡器周期发生一个开关周期。当外部检测电阻器(VRSENSE)上的电压不存在时,检测到“轻负载状态”当高侧MOSFET导通时,超过脉冲跳过阈值(13mV典型值)。当重置时输出锁存器的信号来自误差求和比较器,当VRSENSE低于该值时,它被忽略,一旦VRSENSE达到脉冲跳变阈值,就会驱动实际复位。这给了一些一段时间内保持输出电压高于其标称值的额外能量。振荡器脉冲现在设置好了只有当反馈信号指示输出电压低于其标称值时,输出锁存价值观。这样,大多数振荡器脉冲被跳过,由此产生的开关频率要低得多,如由以下关系表示:
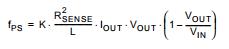
式中K=3.2×103
fPS的单位是赫兹。因此,由于开关和栅极驱动造成的损耗考虑到低输出功率下的功耗,都大大降低了。1段可以在输入电压非常接近输出电压的情况下工作(即输出电压为5V),其中电流波形可以是平坦的,以防止脉冲跳变被激活。为了避免这种情况,在低输入电压(VIN<6.8V)下,脉冲跳过阈值(仅第1节)大约减半。在这种情况下,在上述公式中,常数K变为12.8×103。脉冲跳频时,输出电压比PWM方式高出约10mv,这是由于它的工作模式操作的。如果由于任何原因这种“负载调节”效果不理想,则可能会禁用脉冲跳过功能(参见“电源管理”部分),从而降低轻负载下的效率。
MOSFET驱动器
为了得到高边N沟MOSFET的栅极驱动电压,采用了自举技术。高压侧MOSFET关闭时,电容器通过5V PREG5线的二极管交替充电然后通过内部浮动驱动器连接到其栅极源引线,以打开MOSFET。PREG5系列也用于驱动同步整流器,因此强烈建议使用低阈值MOSFET(即所谓的“逻辑电平”器件)。这些驱动因素是“动态”型的,这意味着他们不会给出当前消费的来源在静态条件下(开或关),但仅在过渡期间。此功能旨在将设备的功耗降到最低,即使在两个低侧MOSFET都开启的情况下也是如此。采用自适应防击穿保护来防止交叉传导:低侧mosfet匝在HSRC引脚高于2V之前关闭on,同样,高侧mosfet开启被禁用,直到RGATE引脚高于0.3V。在两个MOSFET都处于关闭状态时电流由肖特基二极管保证。由此产生的死区时间取决于所用的mosfet和电感器中的电流流动;这样可以使用多种mosfet并避免交叉传导。
保护
每个转换器都有充分的故障保护。监控系统检查输出,在发生此类事件时快速禁用感兴趣的转换器。此条件被锁定并允许设备重新启动,要么必须移除电源电压,要么必须移除相对RUNx引脚开得很低。同时检测到欠压情况:轻微欠压(编程值的90%)只会导致当硬欠压(编程值的70%)导致两个转换器的操作中断时,相对PWROKx被驱动低。这是一种短路保护。PWROKx信号(引脚10和23)显示相关部分的异常(输出电压不在±10%编程电压),输出电平低。如果芯片过热(超过135°C典型值),则设备只要温度低于安全值(105°C典型值),就停止运行。超温状态两个PWROKx上的低电平也发出了信号。电流限制比较器防止过载时电流过大。它以电压的形式介入VRSENSE超过50mV,在误差求和之前关闭高压侧开关。顺便说一句,这个也是使设计者能够通过选择适当的感应电阻来编程最大工作电流。这种逐脉冲限制提供了准恒流特性。
线性驱动器
该线性驱动器能够通过引脚VDRLIN从外部PNP晶体管下降到60mA考虑图4所示的典型应用电路。内部比较器由同一引脚供电VDRLIN,可接受4.5V至20V范围内的电压。如果应用在允许调节的输入电压范围内,则可直接从输入源(VIN)获得调节器电源。如果不是这样,并且没有额外的输入电压,获得电源的最方便的方法在两段电感器中的一段上使用辅助绕组,带捕捉二极管DS和滤波电容器,如图5所示。在每个开关循环的循环周期内,该绕组将能量传递给pin VDRLIN,电压由匝数比n决定,对输入电压的依赖性很小。

如果带辅助绕组的部分在满负荷下工作,而线性调节器是轻负荷的,则引脚VDRLIN处的电压可能超过预期值。事实上,DS和CS充当峰值保持电路VDRLIN受开关瞬态电压尖峰的影响。内部钳位限制VDRLIN引脚的最大值为16V,但是,在干预的情况下,芯片的功耗将起来。那个只要芯片上有PREG5和VREF,线性驱动器就始终处于活动状态(参见相关章节);它工作的目的是在VFBLIN引脚上获得大约2.5V的电压。这样,最小调节电压为2.5V,直接将VFBLIN引脚连接至输出,而最大值约为电源电压减去双极PNP VceSAT。
为了使调节器正常工作,针脚VDRLIN处的电压不得过低。反激连接如果有良好的磁耦合,两个绕组中的一个可确保电压调节良好。耦合的但是,如果主输出负载较轻,则电感器配置无法维持辅助电压:二次电压下降,系统失去调节。如果相关部分的负载足够大,则可使用L5994实现附加绕组。为了克服这个问题,在L5994A中,当VDRLIN电压低于某个阈值(13.7V±5%)时由于段2上的负载太轻,相关同步整流器在电感器电流为零的间隔(“一次触发”特性,参见图6)。这样,电感器电流将正向传输到辅助输出的输出电容器能量反向并吸取。如果线性驱动器不需要由线性驱动器提供,则由线性驱动器提供,保持浮动此引脚意味着线性驱动器未提供,因此不会浪费电源(仅限L5994)。如果两个runx信号中至少有一个被断言,则线性调节器激活

+5V线性调节器和+2.5V参考电压发生器5V低压降稳压器直接为MOSFET驱动器供电,它可以通过引脚从外部获得+5。低通滤波器连接在PREG5引脚和SREG5引脚之间,所有内部电路都是这样动力十足。这种R-C网络的引入有助于减少噪声的影响。这种发电机的典型外部用途是给用于产生栅极驱动的自举电容器充电两个PWM转换器的高压侧MOSFET的电压。在启动和5V段不工作时,该调节器由芯片输入电压供电。为了减少功耗,关闭线性调节器,并将PREG5引脚内部连接至5V当5V PWM调节器激活且其输出电压高于切换阈值,4.5V。当V5SW引脚连接到1段输出调节5V时,会发生这种情况。在任何情况下,如果V5SW高于4.5V,内部调节器关闭,PREG5通过该引脚供电。
L5994-L5994A
5V调节器始终处于激活状态,即使两个PWM调节器都被禁用,2.5V参考电压发生器,提供阈值检测和设备操作的比较电平。允许从其缓冲输出(通过引脚外部可用)向外部负载提供高达5mA的电源VREF。如果两个RUNx信号中至少有一个被断言,则参考电压发生器激活。如果PREG5或VREF没有提供正确的电压,则设备关闭。

电源管理
该装置配有一些控制销,适用于执行一些常用功能或有时在电池供电的设备中需要。此外,它的特点是控制时序,以防开启/关闭和设备关闭,在任何情况下都能安全可靠地运行。如上所述,RUN1和RUN2引脚允许通过逻辑分别禁用两个PWM转换器如前所述,信号(可能来自μP)。NOSKIP可以禁用脉冲跳过功能:当它保持在高位时,两个PWM调节器都不允许进入这种操作。当相对PWM调节器输出时,两个PWROKx信号(每个部分一个)立即驱动低电平低于其自身的欠压(轻或硬)阈值或当其被禁用时。当相对调节器正常运行时,该值为高。连接在CRST和地面之间的电容器以1.5msec/nF的顺序固定一个时间,延迟PWROKx的过渡低-高。这发生在每段启动时或恢复欠压后使用相对RUNx命令的条件。延迟从输出电压达到正确值。在另一种情况下,同样的延迟也会介入:当一个区段被禁用时(因为它的RUNx低驱动或由于热关机),相关的同步整流器在上述延迟之后被打开以确保不再供应负载。然而,在过电压的情况下,这种延迟不起作用:同步整流器立即转动开机后关机,从而起到内置“撬棍”的作用。所有这些定时序列在图7中示出。
设计程序
基本上,应用电路拓扑是固定的,设计过程只涉及适用于特定应用的电压和电流要求的元件值。因此,我们需要知道的设计数据是:
输入电压范围:
最小(VINMIN)和最大(VINMAX)电压应用程序有望运行
两个部分的最大负载电流
第1段Iout1
第2段Iout2
线性调节器的输出电压和电流,设置为12V 50mA,使用附加绕组5.1V段
各开关段输出电压的最大峰间纹波幅度:
第1段的Vrpp1
第2段的Vrpp2
工作频率fSW(200kHz/300kHz或外部同步)。
值得做一些初步考虑。开关频率的选择取决于应用的要求。如果目标是最小化外部组件的尺寸,则应选择300kHz。对于低输入电压应用,首选200kHz,因为这会导致更高的最大占空比。对于开关稳压器,输出滤波器的电感值影响电感电流纹波:电感越高,纹波越小。这意味着较低的电流感应电阻值(对于给定的IOUT),更低的铁心损耗和较低的输出电压纹波(对于给定的输出电容器),但另一方面,更多由于负载变化,铜损耗和更糟糕的瞬态行为。通常是峰间最大纹波振幅(在VINMAX时出现)选择在满载电流的15%到50%之间。很方便引入一个波纹系数RF,因此它是一个介于0.15和0.5之间的数字。对于线性调节器,其输入电压VDRLIN不应低于12V,因此如果使用辅助风,则应确定尺寸,以获得具有一定裕度的电压(例如,13-14V)。相反,较高的输入电压会导致PNP晶体管内部的损耗更高,从而损害效率,并导致更高的损耗+5V电感器上的总电流。此外,它意味着更高的匝数比,因此磁耦合也更差,会影响反飞过程中的能量传递。
+3.3V电感器
定义电感时,首先要确定电感值。其最小值由以下公式给出:

应选择值L3>L3MIN。堆芯几何形状选择与在空间利用和其他实际问题方面的具体应用,如安装的方便性、可用性和等等。至于材料,应选择铁素体、钼合金或KoolMμ,以达到效率高。这些材料提供低铁心损耗(特别是铁氧体),因此设计可以集中在防止饱和和限制铜损耗上。即使在最大峰值,也必须避免饱和当前:

为限制铜损耗,绕组直流电阻RL应尽可能低(在mΩ范围内)。自动控制损失通常可以忽略不计。减小直流电阻的实用标准是使用最大的导线适合选定的核心。无论如何,最好的解决方案,只要可能,是使用现成的满足要求的电感器就电感和最大直流电流而言。目前,man u制造商提供的产品种类繁多,也适用于表面贴装组件。
+5.1V变压器
一次绕组也承载二次功率,因此一次总平均电流为:
其中,VDRLIN是一次回路再循环期间产生的电压,并馈入+12V的输入端线性调节器。选择变压器匝数比为1:n,使VDRLIN大于13V为了使杂散参数最小化,二次侧参考5.1V输出,因此最小值由以下公式得出:

其中,Vf是整流器的正向压降(假设1V为保守值)。确保辅助设备连接正确的极性(见图4)。最小一次电感值可以表示为:

式中,若要获得L5PMIN的正值,必须满足不等式:
其中,VIN可以是VINMIN或VINMAX,取L5PMIN的较高值。对于一次进线L5P>L5PMIN,一次峰值电流(不得使磁芯饱和)为:

至于变压器实现,这里可以重复考虑+3.3V电感器。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 ADI 高精度低功耗精密放大器
ADI 高精度低功耗精密放大器






 APP下载
APP下载 登录
登录







