
特征
能够驱动双极步进电机的两个绕组
电机或两台直流电机
每个绕组的输出电流高达1.2A
电压范围广:12V至40V
四象限电流控制,适用于
微步进与直流电机控制
精确PWM控制
不需要再循环二极管
TTL/CMOS兼容输入
交叉传导保护
热关机
说明
L6258E是一种双全桥电机控制在BCD技术中实现的应用驱动双极绕组的能力步进电机或双向控制两个直流马达。L6258E和一些外部部件形成a完整的控制和驱动电路。它有很高的高效相移斩波最低电流控制时的低电流纹波电平,使该设备成为步进机的理想选择以及直流电机。功率级是一个双DMOS全桥能够维持高达40V的电压,包括电流二极管再循环输出电流连续模式下每个绕组的容量为1.2A,峰值启动电流高达1.5A.A热保护电路禁用输出如果芯片温度超过安全限值
电气特性
(VS=40V;VDD=5V;Tj=25°;除非另有规定。)

电气特性(续)
(VS=40V;VDD=5V;Tj=25°;除非另有规定。)
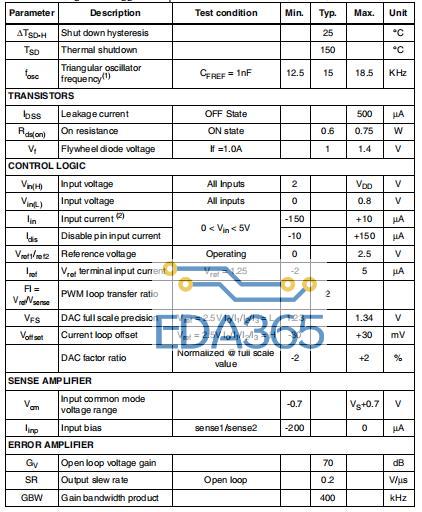
1.斩波频率是fosc值的两倍。
2.除禁用输入外,所有逻辑输入都是这样。
功能描述
该电路用于驱动双极步进电机或两个直流电机的两个绕组。电流控制通过开关模式调节产生。在这个系统中,负载电流的方向和振幅取决于电流控制回路的两个输出之间的相位和占空比关系。L6258E功率级是由桥配置的动力DMO组成的如图4所示,其中桥输出OUT_A和OUT_B通过输入端的高电平输入端和输入端的高电平被驱动至接地端,而相同的输入。零电流条件是通过利用μA和中的信号驱动两个半桥得到的在同相位,占空比为50%的情况下。在这种情况下,两个半桥的输出在电源之间连续切换电源(Vs)和接地,但保持负载之间的压差等于零。图4显示了这两个输出的时序图和负载电流工作条件。
接下来,我们考虑正电流流入负载的方向是从a出口当我们认为流入负载的电流为负时从外到外。现在只需增加IN峎A信号的占空比,减小IN峎B的占空比信号我们把正电流输入负载。这样,两个输出不同相,电流可以通过由T1和T4组成的对角线电桥,当输出端被驱动到Vs和输出端时当电流再循环到当两个输出均为Vs和电流再循环时,通过T1和T2的电桥当两个输出都连接到接地。由于施加在再循环负载上的电压很低,由此产生的电流放电时间常数大于当前充电时间常数电流通过T1和T4形成的斜桥流入负载。就这样负载电流为正,平均振幅取决于两个驱动信号的占空比。图4所示为正负载电流情况下的时序图相反,如果我们想驱动负电流进入负载就必须降低输入A信号的占空比,并增加输入B信号的占空比。就这样我们得到了两个输出之间的相移,以便电流流入当输出端被驱动到地面时,T2和T3形成的对角线电桥输出输出被驱动到Vs,而我们将有相同的电流再循环条件前一种情况下,两个输出都驱动到Vs或接地。所以,在这种情况下,负载电流总是负的,平均振幅总是取决于两个驱动信号的占空比差异。图4所示为负负载电流情况下的时序图。图5显示了整个电流控制回路的装置框图。
参考电压
施加在VREF引脚上的电压是内部DAC的参考电压,与感应电阻值,根据以下关系:
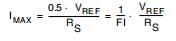 式中,Rs=感测电阻值
式中,Rs=感测电阻值

输入逻辑(I0-I1-I2-I3)
根据下表选择电机绕组中的电流电平:

电流控制回路
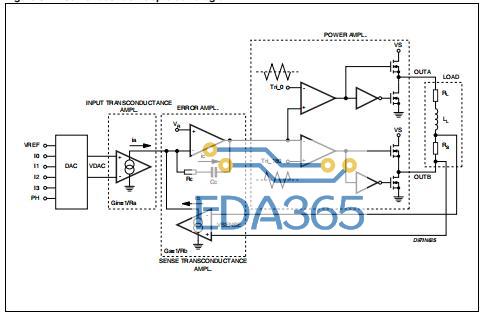
电流控制回路是一个工作在PWM模式下的跨导放大器。电机电流是已编程的DAC电压的函数。为了控制输出电流,电流控制调节两个输出OUT U A和OUT U B,一个感测电阻器Rs与电机绕组,以便产生一个电压反馈与编程值比较DAC的电压。两个输出的占空比调制是通过比较误差放大器的输出,带有两个三角波基准。为了使用前面解释的占空比调制驱动输出电桥驱动每个输出(OUTA和OUTB)的信号是通过使用这两种方式产生的比较器有两个三角形波信号作为参考,Tri_0和Tri_180相同振幅,相同的平均值(在我们的情况下是Vr),但每个相位偏移180°其他。两个三角波参考分别应用于第一个三角形波的输入比较器和第二比较器的非反相输入端。比较器的另外两个输入端连接到误差放大器输出端由编程的DAC之间的差异产生的电压。重置图6显示了上述信号之间的比较。
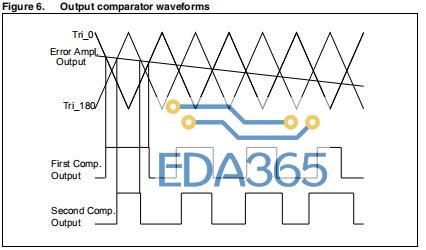
在VDAC等于零的情况下,跨导回路在Vr值处平衡,所以两个比较器的输出是具有相同相位和50%占空比的信号循环。正如我们已经提到的,在这种情况下,OUT_A和OUT_B的两个输出是同时从Vs驱动到接地;以及通过负载的差分电压外壳为零,电机绕组中无电流流动。
在VDAC上有正差分电压(见图5),跨导回路将正面不平衡尊重虚拟现实。在这种情况下,误差放大器的输出电压大于Vr,则第一个输出比较器是一个占空比大于50%的方波第二个比较器是占空比小于50%的方波。在两个比较器的输出端获得的占空比变化是相同的,但是对于50%的水平,一个是正的,另一个是负的。在这种情况下产生的两个驱动信号以这样的方式驱动两个输出开关电流从OUT U A流过电机绕组,然后流向OUT帴B。对于负差分电压VDAC,跨导回路将是负的不平衡受尊重的虚拟现实。在这种情况下,第一比较器的输出是占空比小于50%,而第二个比较器的输出是占空比更高的方波超过50%。在两个比较器的输出端获得的占空比变化总是相同的。在这种情况下产生的两个驱动信号驱动两个输出,以便把电流从U绕组输出到电机。
电流控制回路补偿
为了有一个灵活的系统能够驱动具有不同电气特性的电机,误差放大器的非反相输入和输出可用。在这些引脚上连接一个外部RC补偿网络,可以调整电流控制回路的增益和带宽
开环传递函数分析
框图:见图5。
输入参数:
VS=24伏
LL=12小时
RL=12ΩRS=0.33ΩRC=待计算
CC=待计算
Gs跨导增益=1/Rb
Gin跨导增益=1/Ra
振幅。Tria_0_180参考值=1.6V(峰-峰)
Ra=40KΩRb=20KΩVr=内部参考值等于VDD/2(典型值。2.5伏)
这些数据指的是一个典型的应用程序,并将在分析过程中用作示例电流控制回路的稳定性。方框图显示了L6258E内部电流控制回路的示意图输入电压为PWM工作模式VDAC,两个变量之间的关系由下式给出:

VDAC是定义负载电流值的控制电压
Gin是输入跨导放大器的增益(1/Ra)
Gs是感测跨导放大器的增益(1/Rb)
Rs是串联到输出端以检测负载电流的电阻在此配置中,输入电压与来自感应电阻,然后这两个信号之间的差被误差放大放大器,以获得控制输出级占空比的误差信号控制负载电流。很明显,要有良好的电流控制回路,误差放大器必须有高直流增益和大带宽。
增益和带宽必须根据应用程序的许多参数进行选择,例如负载、电源等的特性,最重要的是稳定性必须始终得到保证的系统。有一个非常灵活的系统,并有可能使系统适应任何应用中,误差放大器必须使用连接的RC网络进行补偿输出和负输入之间相同。为了评估系统的稳定性,我们必须考虑电流控制回路:Aloop=ACER·ACpw·A负载·ACsense是指误差、功率和感测放大器加上的块的增益负载块的衰减。用dB表示的相同公式可以这样写:AloopdB=ACERDB+ACpwdB+A负载数据库+ACsensedB现在我们可以开始分析每个单独块体的动态特性特别注意误差放大器。
功率放大器
功率放大器不是线性放大器,而是在PWM模式下驱动输出的电路全桥配置阶段。输出占空比变化通过比较误差电压得到放大器和两个三角波参考Tri-0和Tri-U180。因为所有的电流控制回路是参考Vr参考,结果是当输出电压误差放大器等于Vr电压,两个输出输出端A和输出端B具有相同的电压相位和占空比为50%;将误差放大器的输出电压提高到Vr电压下,Out U A的占空比增加,Out U B的占空比减小相同的百分比;相反地,将误差放大器的电压降低到Vr电压、Out廑U A的占空比降低,Out廑B的占空比降低同样百分比的增长。
该块的增益由两个三角波参考的振幅定义;更精确地说,功率放大器块的增益是两个参考信号的振幅。实际上,误差放大器输出电压的变化会产生更大的占空比变化当两个三角形的振幅较低时,两个输出输出的周期波浪参考。当输入电压等于振幅时,占空比的最大值为100%在两个三角参照系中。该模块的传递函数包括输出占空比与三角形参考的振幅。


此外,将Tri_0和Tri_180作为一个三角形,很明显该块的传递函数是一个无极点和零的线性恒定增益。
负载衰减
负载块由电机绕组的等效电路(电阻和电感)加上感应电阻。我们将在下一章中考虑电机的Bemf电压的影响。这个模块的输入是功率放大器的PWM电压,作为输出,我们有电流流入电机绕组产生的感应电阻上的电压。这两个变量之间的关系是:

RL=电机绕组的等效电阻
RS=感测电阻器
由于电动机LL的电感,负载有一个极,频率为:
在分析误差放大器模块和感测跨导模块之前,我们必须考虑一下:
AloopdB=AxdB+BxdB
Ax | dB=ACpw | dB+A负载| dB
和Bx | dB=ACerr | dB+ACsense | dB
这意味着Ax | dB是功率放大器和负载块的总和;最大分贝=(29,5)+(-31.4)=-1.9分贝Ax传递函数的BODE分析为:
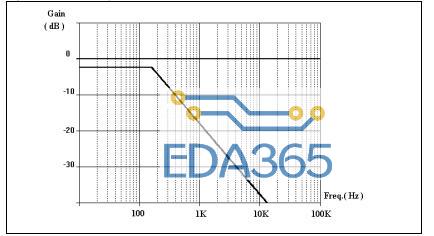
Ax | dB函数的Bode图显示了-1.9dB的直流增益和163Hz的极点。现在很明显(由于Ax函数的负增益),Bx函数必须具有一个高的直流增益,以增加总开环增益增加带宽。
误差放大器和感测放大器
如前所述,这两个块的增益为:BxdB=ACerrdB+ACsensedB作为Bx块和误差放大器输入端的感测电阻之间的电压电压输出相同,电压增益由以下公式得出:

申请信息
典型的应用电路如图11所示。
注:为了避免电流尖峰在下降沿禁用一个“直流反馈”将被添加到误差放大器。图11(R1-11)。
干扰
由于电路采用开关模式电流调节,以降低接线电感的影响一个好的电容器(100nF)可以放在板附近电源线(针脚13、31)和电源接地(针脚)之间的包装1,36,18,19)吸收少量的感应能量。需要注意的是,除了电解液外,通常还需要这种电容器在高频下性能较差的电容器,通常位于组件,在电源电压(针脚13、31)和电源接地(针脚1、36、18、19)之间在快速电流衰减或相位期间有电流再循环路径改变。该电容器的量程值在几μF到100μF之间,必须选择取决于电机电感和负载电流幅值等应用参数。在逻辑电源和接地之间还建议使用100nF的去耦电容器。EA_IN1和EA_IN2引脚执行高阻抗线路,必须注意避免信号上的耦合噪声。建议将组件连接到这个引脚靠近L6258E,用地面轨道包围它们,并尽可能远地保持设备可能的快速切换输出。还记得在在电源启动/关闭期间,避免输出电流峰值。无感电阻是实现传感的最佳方式。不管这是不是有可能,一些相同值的金属膜电阻器可以并联。用于感应绕组电机电流的两个输入端(感应A和感应B)应直接连接到感测电阻器Rs端子上,并在Rs和两个感应输入应尽可能短。
注:将禁用引脚连接到低阻抗(<300Ω)电压源,以降低at使OUT1A(引脚5)电容耦合对输出电流的干扰最小和禁用(引脚6)

电机选择
有些步进电机的铁心损耗很高,不适合开关模式现行法规。此外,有些步进电机的设计不是连续的在最大电流下运行。因为电路可以驱动恒定电流通过电机,在低速和高速运行时,其温度可能超过。
未使用的输入
未使用的输入应连接到适当的电压水平,以获得最高抗扰度
PCB设计注意事项
我们建议遵守以下布局规则,以避免接地和异常再循环电流。电源和逻辑电源的旁路电容器必须尽可能靠近IC。在PCB板上分离逻辑和电源接地以及内部电荷泵电路接地,避免逻辑信号的接地痕迹穿过地面电源信号的痕迹。因为集成电路把电路板用作散热片,散热铜片的面积必须在符合香港电台amb的要求值。
『本文转载自网络,版权归原作者所有,如有侵权请联系删除』








 热门文章
更多
热门文章
更多

 浅谈IP技术在网络电视中的应用
浅谈IP技术在网络电视中的应用







 APP下载
APP下载 登录
登录







