APP下载
APP下载 登录
登录







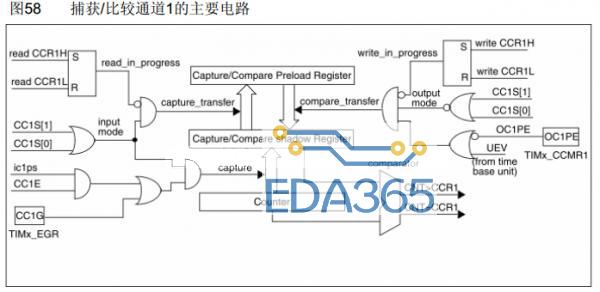
在捕获模式中,基本上只用到了读进程,在STM8中有一个影子寄存器,但对于我们来说是看不到的,我们仅操作预装载寄存器即可。而且需要注意的是无论是计数器还是捕获/比较寄存器都是先读/写高8位,后读/写低8位数据。
在文档中给出了一个输入捕获模式的流程
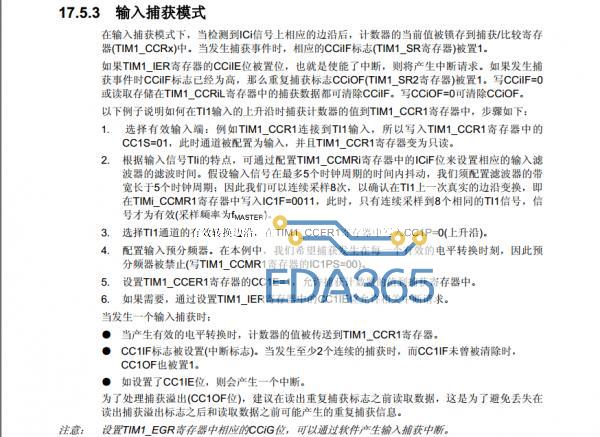
按着这个流程来就可以完成我们的输入捕获
文档中首先提到将TIM1_CCMR1寄存器的CC1S位写01,将端口配置为输入,但在TIM1_CCMR1的寄存器中有说明CC1S位的更改需在通道关闭时(TIM1_CCER1寄存器的CC1E=0)才可写入,
因此在配置中先将TIM1_CCER1寄存器的CC1E位写0,然后将TIM1_CCMR1的CC1S位写01,
TIM1_CCER1 &= (unsigned char)~0x01;//清零TIM1_CCER1中的CC1E位,之后才可配置TIM1_CCMR1TIM1_CCMR1 = 0x01;//配置TIM1_CCMR1中的CC1S位为1,CC1通道配置为输入,IC1映射到TI1FP1上//无滤波器、无预分频器(捕获输入口上检测到的每一个边沿都触发一次捕获)
TIM1_CCMR1寄存器有两种功能,分别对应捕获模式和比较模式,只需要捕获模式即可
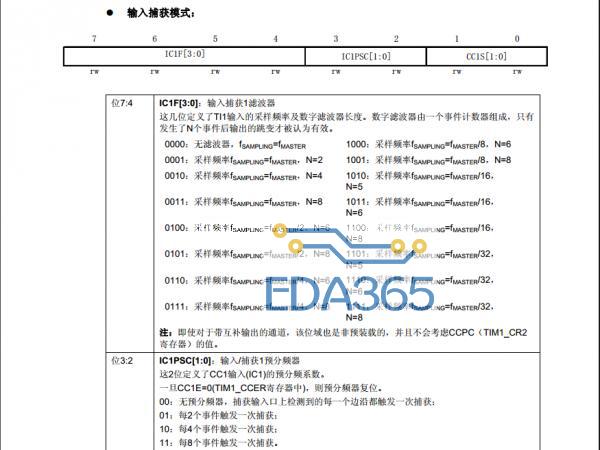
滤波器是用来避免频率波动的直接写0即可,无滤波器,分频器我们也写00不用分频器,当然也可以使用分频器,提高准确率。
接着是设置触发方式,我们选择上升沿触发
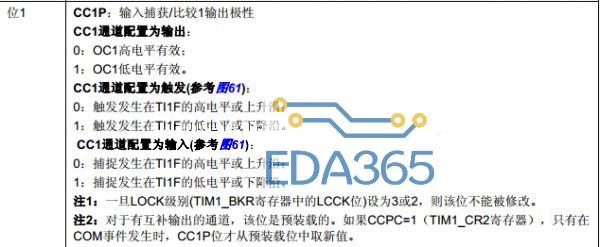
TIM1_CCER1 &= (unsigned char)~0x02;//上升沿或者高电平触发
最后使能捕获功能,设置TIM1_CCER1寄存器的CC1E位=1,由于我们采用中断方式因此也将TIM1_IER寄存器的CC1IE位置1,允许中断请求。
完整的初始化代码如下
void signal_capture_Init(void){TIM1_CNTRH = 0x00;//清零计数器高8位TIM1_CNTRL = 0x00;//清零计数器低8位TIM1_PSCRH = 0x00;//计数器时钟分频高8位TIM1_PSCRL = 0x10;//计数器时钟分频低8位16分频TIM1_CCER1 &= (unsigned char)~0x01;//清零TIM1_CCER1中的CC1E位,之后才可配置TIM1_CCMR1TIM1_CCMR1 = 0x01;//配置TIM1_CCMR1中的CC1S位为1,CC1通道配置为输入,IC1映射到TI1FP1上//无滤波器、无预分频器(捕获输入口上检测到的每一个边沿都触发一次捕获)TIM1_CCER1 &= (unsigned char)~0x02;//上升沿或者高电平触发TIM1_IER |= 0x02;//CC1IE=1,使能捕获/比较1中断TIM1_CCER1 |= 0x01;//捕获使能TIM1_CR1 |= 0x01;//使能定时/计数器}当发生一个输入捕获时,计数器的值被传送到TIM1_CCR1寄存器中,计时器的时钟源在程序中我们设置为16分频

分频过后计数器的频率为1MHz,这里采用分频主要是避免计数器溢出,这样同时也降低了精度,同时设置计数器的初值为0,计数器默认计数方式是向上计数,计到最大值后又从0开始计数,
中断处理代码如下
@far @interrupt void signal_capture_irq (void){if(TIM1_SR1&0x02){TIM1_SR1 &= (unsigned char)~0x02;//清除CC1IF标志if(vsync_cap_data_old == 0x00){//第一次捕获中断来临vsync_cap_data_old = TIM1_CCR1H;//先读取高8位数据vsync_cap_data_old = (unsigned int)(vsync_cap_data_old<<8) + TIM1_CCR1L;//再读取低8位数据}else{//第二次捕获中断来临vsync_cap_data_new = TIM1_CCR1H;//先读取高8位数据vsync_cap_data_new = (unsigned int)(vsync_cap_data_new<<8) + TIM1_CCR1L;//再读取低8位数据TIM1_IER &= (unsigned char)~0x02;//禁止通道1捕获/比较中断TIM1_CR1 &= (unsigned char)~0x01;//停止计数器if(vsync_cap_data_new > vsync_cap_data_old)vsync_period = (vsync_cap_data_new - vsync_cap_data_old);elsevsync_period = 0xFFFF + vsync_cap_data_new - vsync_cap_data_old;vsync_cap_data_old = 0x00;isCaptureOver = 1;}}}我们捕获两次中断计算时间差,
if(isCaptureOver){//如果捕获完成则对数据进行处理cmd_puts("period:");cmd_hex((unsigned char)(vsync_period>>8));cmd_hex((unsigned char)vsync_period);TIM1_CNTRH = 0x00;//清零计数器高8位TIM1_CNTRL = 0x00;//清零计数器低8位TIM1_IER |= 0x02;//CC1IE=1,使能捕获/比较1中断TIM1_CR1 |= 0x01;//使能定时/计数器isCaptureOver = 0;}这里只从串口输出了周期,结果如下
可以看到周期在一个范围内波动我们取一个值0x79ED来计算,它所对应的频率f=1000000/0x79ED=32.0379Hz还是比较接近我们的实际输入频率30Hz,误差是大了些,可以通过代码继续改进








 热门文章
热门文章