国产EDA的困局在哪里?
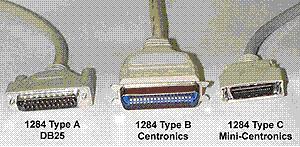
计算机的并行接口 因为个人计算机(PC机)占有计算机市场的绝大部分份额.一般人能接触到的和认知中的计算机基本就是IBM PC计算机及兼容机.这种计算机使用INTEL X86硬件平台和MICROSOFT WINDOWS操作系统(早期为MS-DOS操作系统)的软
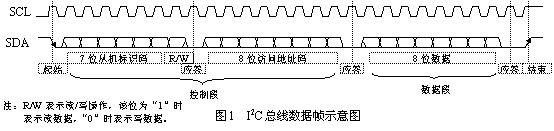
总线技术基础学习 如果一座只能容一个人来往的独木桥.两端的人都想要过桥.为了不拥挤.阻塞.那我们就得采取有效的办法.比如规定某段时间哪端的人过桥.另一端的人就等着该他过桥的时间段的到来.同时也还可以规定人多时
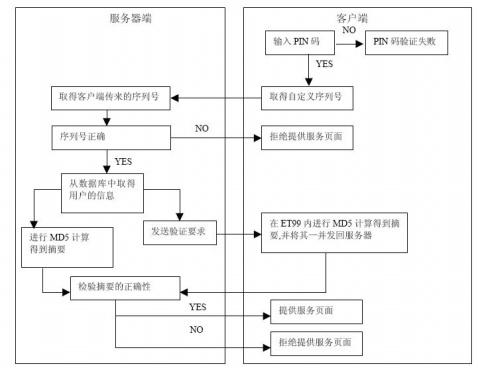
USB-KEY原理简要说明 一.usbkey实现身份认证原理采用冲击响应的认证方法.登录时在服务器端和客户端同时进行计算.客户端计算前要先验证USER PIN.通过后在硬件中使用HMAC-MD5密钥进行计算.服务器端在服务器上使用软件进行计算.比较计
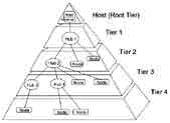
全面认识USB的技术精髓 USB是Universal Serial Bus的简称.它是一种可以同时处理计算机与具有USB接口的多种外设之间通信的电缆总线.这些连接到计算机上的外设共同分享USB的带宽.USB的分时处理机制真正在硬件的意义上实现了计算
变频器中常用的控制方式 2.1非智能控制方式在交流变频器中使用的非智能控制方式有V/f协调控制.转差频率控制.矢量控制.直接转矩控制等.(1)V/f控制V/f控制是为了得到理想的转矩-速度特性.基于在改变电源频
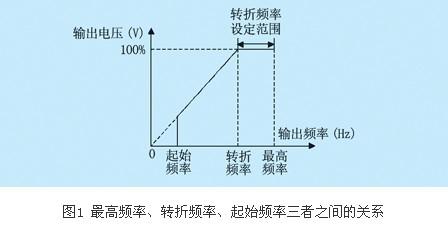
变频器基本参数的调试 变频器功能参数很多.一般都有数十甚至上百个参数供用户选择.实际应用中.没必要对每一参数都进行设置和调试.多数只要采用出厂设定值即可.但有些参数由于和实际使用情况有很大关系.且有的还相互关联.因此要根据
STM32 GPIO 配置 固件库 V3.5 IAR/******************************************************************************** 函数名称: GPIO_Configuration* 函数功能: 设置各GPIO端口功能* 参数变量: NONE*全局变量: NONE* 调用函数:*


 APP下载
APP下载 登录
登录