APP下载
APP下载 登录
登录







1 引言
在造纸、印染、纺织等高精度、高转速传动系统中,随着工业自动化程度的提高和生产规模的扩大,采用单电机驱动往往难以满足生产的要求。而多电机同步控制历来是最核心的问题,对多电机同步协调控制,国内、外同行也有不少研究。在实际应用中,多电机的同步性能会因各传动轴的驱动特性不匹配、负载的扰动等因素的影响而恶化,因此同步控制方法的好坏直接影响着系统的可靠性。
本文通过对的多电机同步传动系统主要控制策略分析,得出改进的耦合控制是当前比较好的控制思想,实际应用中采用易于实现的PID作为同步补偿控制器算法。但传统PID控制器结构简单、鲁棒性较差且抗扰动能力也不太理想。因此在控制策略上,采用神经网络控制和PID控制算法相结合的方法。仿真结果表明,将该方法用于多电机同步控制中,不仅具有良好的动态性能,而且整个系统同步精度也有所提高。
2 多电机同步控制的原理
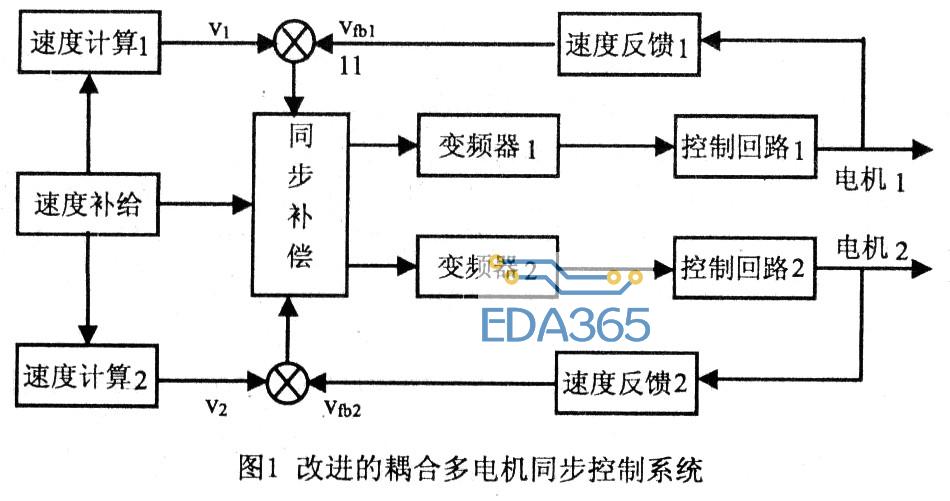
对于多电机同步控制系统来说,实现的是电动机转速的跟随,受到扰动的电动机转速是变化的,其它的电动机跟随这台电动机的转速变化。在系统受到扰动后的初始状态,电动机之间的转速趋于同步越快越好,即应尽快消除转速偏差;当电动机之间的转速趋于同步时,要尽量减小转速发生超调。一般情况是要求系统中的第i台电动机转速vi和第i+l台电动机转速vi+1,之间保持一定的比例关系,即vi=a・vi+1以满足系统的实际工艺要求。这里a为转速同步系数。在实际运行过程中若要满足系统的同步要求,周期采样获取某一环节的前台电动机转速vi和后台电动机转速vi+1后,vi和vi+1按下式定义转速同步偏差时,表明在同步系数a下,vi和vi+1同步,当e≠0时,表明在同步系统aF,vi和vi+l不同步.在本文中采用改进的耦合同步控制系统(如图1),各电机采用同一电压给定的基础上,电机l转速误差△v1=v1―vfb1,电机2的转速误差△v2=v2一vfb2,计算某一电机实际速度和给定速度的偏差e,以及当前的偏差变化量△e,同步控制器补偿同样采用PID控制。其差值经过PID补偿器加到随动电机输入端。
3 基于神经网络PID控制器的建立
BP神经网络是应用最广泛的一种人工神经网络,在各门学科领域中都具有很重要的实用价值,根据本系统的控制系统的特点,为了快速消除同步误差,本文采用BP神经网络与PID相结合的作为同步补偿方法。
3.1 BP神经网络PID控制系统的结构
基于BP网络的PID控制系统结构如图2所示,控制器由两部分组成:
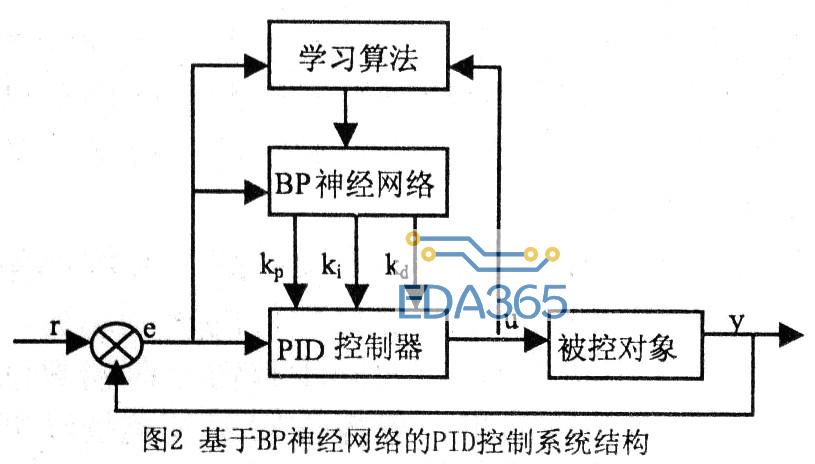
(1)常规PID控制器,直接对被控对象进行闭环控制,并且其控制参数Kp、Ki、Kd为在线调整方式;








 热门文章
热门文章