APP下载
APP下载 登录
登录







加速度计能够测量加速度、倾斜、振动或冲击,因此适用于从可穿戴健身装置到工业平台稳定系统的广泛应用。市场上有成百上千的加速度计器件可供选择,其成本和性能各不相同。本文第一部分讨论设计人员需要知道的关键参数和特性,以及它们与倾斜和稳定应用的关系,从而帮助设计人员选择最合适的加速度计。第二部分将重点关注可穿戴设备、状态监控(CBM)和物联网应用。
最新 MEMS 电容式加速度计应用于传统上由压电加速度计和其他传感器主导的应用领域。新一代 MEMS 加速度计可为 CBM、结构健康监控(SHM)、资产健康监控(AHM)、生命体征监测(VSM)和物联网无线传感器网络等应用提供解决方案。然而,在有如此多加速度计和如此多应用的情况下,选择合适的加速度计并非易事。
尚无行业标准界定加速度计属于何种类别。加速度计的一般分类及相应的应用如表 1 所示。所示的带宽和 g 值范围是加速度计用在所列终端应用中的典型值。
表 1. 加速度计等级和典型应用领域
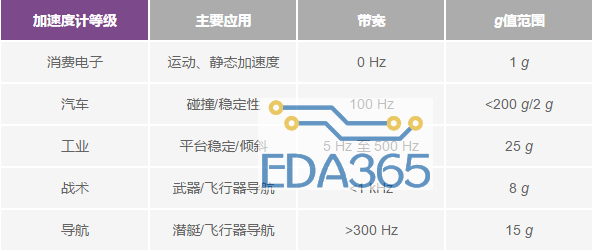
图 1 显示了各种 MEMS 加速度计的快照,并依据特定应用的主要性能指标和智能 / 集成水平将各传感器归类。本文的一个重要关注对象是基于增强型 MEMS 结构和信号处理的新一代加速度计以及世界一流的封装技术,其稳定性和噪声性能可与更昂贵的专门器件相媲美,而功耗更低。这些特性及加速度计的其他关键规格将在下文依据应用相关性加以详细讨论。
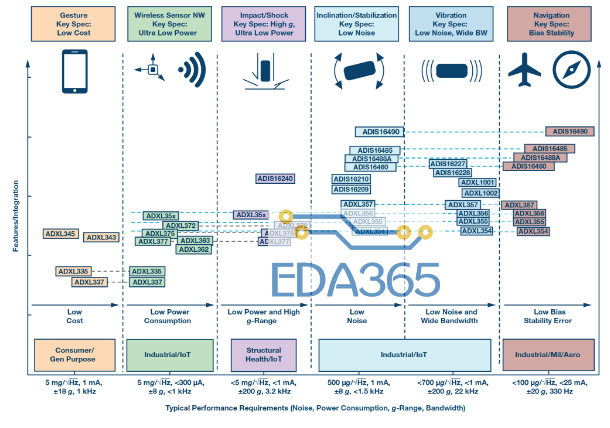
图 1. ADI 公司精选 MEMS 加速度计的应用版图
倾斜检测
主要标准:偏置稳定度、失调温漂、低噪声、可重复性、振动校 正、跨轴灵敏度。
对 MEMS 电容式加速度计而言,精确的倾斜检测是一种要求颇高的应用,尤其是在有振动的情况下。在动态环境中利用 MEMS 电容式加速度计实现 0.1°的倾斜精度非常困难——<1°很困难,>1°较易实现。为使加速度计有效测量倾斜度,必须对传感器性能和终端应用环境有很好的了解。相比于动态环境,静态环境对倾斜测量更加有利,因为振动或冲击可能会破坏倾斜数据,引起严重测量误差。倾斜测量的最重要特性有温度系数失调、迟滞、低噪声、短期 / 长期稳定性、可重复性和良好的振动校正。
0 g 偏置精度、焊接引起的 0 g 偏置漂移、PCB 外壳对准引起的 0 g 偏置漂移、0 g 偏置温度系数、灵敏准确度和温度系数、非线性度以及跨轴灵敏度等误差,是可以观测到的,并且可以通过装配后校准流程加以降低。迟滞、使用寿命期间的 0 g 偏置漂移、使用寿命期间的灵敏度漂移、潮湿引起的 0 g 漂移,以及温度随时间变化引起的 PCB 弯曲和扭转等等,这些误差项无法通过校准或其他方法解决,需要通过一定程度的原位维修才能减少。
ADI 公司的加速度计可分为 MEMS (ADXLxxx)和 iSensor® (ADIS16xxx)特殊用途器件两类。iSensor 或智能传感器是高集成度(4 到 10 个自由度)且可编程器件,适用于动态环境下的复杂应用。这些高集成度即插即用解决方案包括全面的工厂校准、嵌入式补偿和信号处理,解决了上述需要原位维修的很多误差,大大降低了设计和验证负担。这种全面的工厂校准为整个传感器信号链提供额定温度范围(通常是−40°C 至+85°C)内的灵敏度和偏置特性。因此,每个 iSensor 器件都有其独特的补偿公式,安装后可产生精确的测量结果。对于一些系统,工厂校准可免除系统级校准,大大简化操作。
iSensor 器件专门针对某些应用而开发。例如,图 2 所示的 ADIS16210 专门针对倾斜应用而设计并定制,因此,它能提供<1°的相对精 度且开箱即用。这主要归功于集成信号处理和特定器件校准,以 便实现最佳精度性能。iSensor 器件将在稳定性部分进一步讨论。
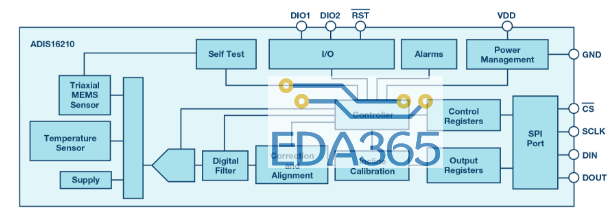
图 2. ADIS16210 精密三轴倾斜
最新一代加速度计架构(例如 ADXL355)提供更多功能(倾斜、状态监控、结构健康、IMU/AHRS 应用),包含的集成模块更少针对特定应用,但功能丰富,如图 3 所示。
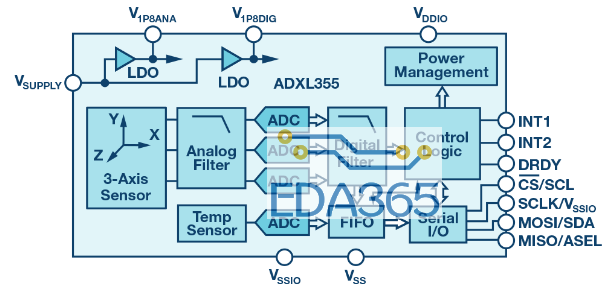
图 3. 低噪声、低漂移、低功耗 3 轴 MEMS 加速度计 ADXL355
下面比较通用加速度计 ADXL345 和新一代低噪声、低漂移、低功耗加速度计 ADXL355,后者是广泛应用的理想之选,例如物联网传感器节点和倾角计。这一比较着眼于倾斜应用中的误差源,以及可以补偿或消除的误差。表 2 列出了消费级 ADXL345 加速度计理想性能规格及相应倾斜误差的估算值。试图达到最佳倾斜精度时,必须采用某种形式的温度稳定或补偿。在下面的例子中,假设恒温为 25°C。无法完全补偿的最主要误差促成因素是温漂失调、偏置漂移和噪声。可以降低带宽来降低噪声,因为倾斜应用通常需要低于 1 kHz 的带宽。
表 2. ADXL345 误差源估算值
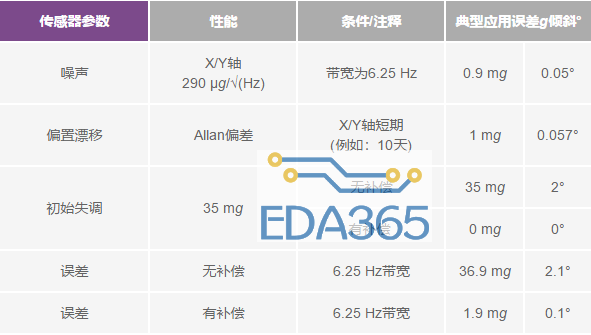
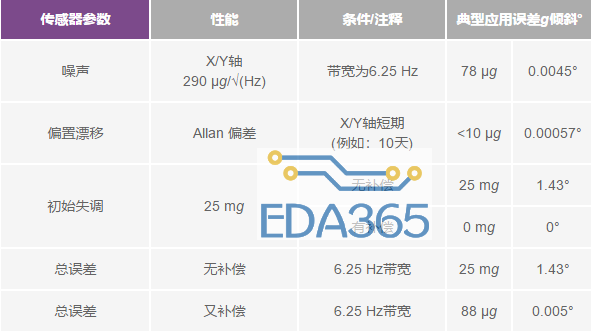
表 3 列出了适用于 ADXL355 的相同标准。短期偏置值根据 ADXL355 数据手册中的 Allan 方差图估算。25°C 时,通用 ADXL345 补偿后的估计倾斜精度为 0.1°。工业级 ADXL355 的估计倾斜精度为 0.005°。通过比较 ADXL345 和 ADXL355 可以看出,重大误差贡献因素引起的误差已显著降低,比如噪声引起的误差从 0.05°降低到 0.0045°,偏置漂移引起的误差从 0.057°降低到 0.00057°。这表明 MEMS 电容式加速度计在噪声和偏置漂移等性能方面取得了巨大飞跃,在动态条件下能够提供更高水平的倾斜精度。
表 3. ADXL355 误差源估算值
选择更高等级的加速度计对于实现所需性能至关重要,特别是应用需要小于 1°的倾斜精度时。应用精度取决于应用条件(温度大幅波动,振动)和传感器选择(消费级与工业级或战术级)。在这种情况下,ADXL345 将需要大量的补偿和校准工作才能实现小于 1°的倾斜精度,增加整个系统的工作量和成本。根据最终环境和温度范围内的振动大小,甚至不可能实现上述精度。25°C 至 85°C 范围内的温度系数失调漂移为 1.375°,已经超过倾斜精度小于 1°的要求。

25°C 到 85°C 范围内 ADXL355 的最大温度系数失调漂移为 0.5°。

ADXL354 和 ADXL355 可重复性(X 和 Y 轴为±3.5 mg/0.2°,Z 轴为±9 mg/0.5°)为 10 年寿命预测值,包括高温工作寿命测试(HTOL)(TA = 150°C、VSUPPLY = 3.6 V、1000 小时)、温度循环(−55°C 至+125°C 且循环 1000 次)、速度随机游走、宽带噪声和温度迟滞引起的偏移。这些新型加速度计可在所有条件下提供可重复的倾斜测量,在恶劣环境中无需进行大量校准即可实现最小倾斜误差,而且能最大程度减少部署后的校准需要。ADXL354 和 ADXL355 加速度计能以 0.15 mg/°C(最大值)的零失调系数保证温度稳定性。这种稳定性最大程度地减少了校准和测试相关的资源和成本开销,帮助设备 OEM 制造商实现更高的吞吐速率。此外,产品采用密封封装,可以确保最终产品出厂后重复性与稳定性始终符合其规格参数。
通常,数据手册上不会显示可重复性和对振动校正误差(VRE)的抑制能力,因为这些参数可能暴露产品性能较低。例如,ADXL345 是一款针对消费类应用的通用加速度计,VRE 不是设计人员的重要关注参数。然而,在惯性导航等高要求应用、倾斜应用或振动频繁的特定环境中,对 VRE 的抑制能力可能是设计人员的重点关注对象,因此 ADXL354/ADXL355 和 ADXL356/ADXL357 数据手册会 给出此类参数。
如表 4 所示,VRE 是加速度计暴露于宽带振动时引入的失调误差。当加速度计暴露于振动环境时,相比温漂和噪声导致的 0 g 失调,VRE 在倾斜测量中会导致明显误差。这是不再使用数据手册的主要原因之一,因为很容易掩盖其他主要规格。
VRE 是加速度计对交流振动(被整流为直流)的响应。这些直流整流的振动可能会使加速度计失调发生偏移,引起严重误差,尤其是在目标信号为直流输出的倾斜应用中。直流失调的任何小变化都可能被解释为倾角变化,导致系统级误差。
表 4. 以倾斜度表示的误差

各种谐振和加速度计(本例为 ADXL355)中的滤波器均可能引起 VRE,因为 VRE 对频率有很强的依赖性。这些谐振会放大振动,放大倍数等于谐振的 Q 因数,而在较高频率时会抑制振动,原因是谐振器存在二阶偶极子响应。传感器的谐振品质因数越高,振动幅度越大,其 VRE 也就越大。较大测量带宽会将高频带内振动包含在内,引起较高的 VRE,如图 4 所示。为加速度计选择合适的带宽以抑制高频振动,可以避免很多振动相关问题。1
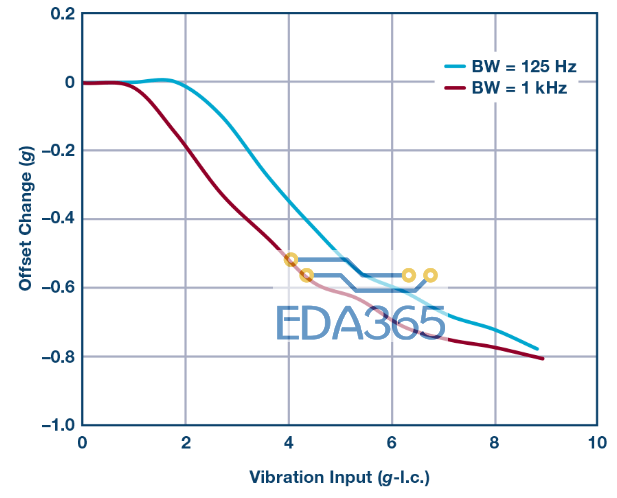
图 4. 在不同带宽进行的 ADXL355 VRE 测试
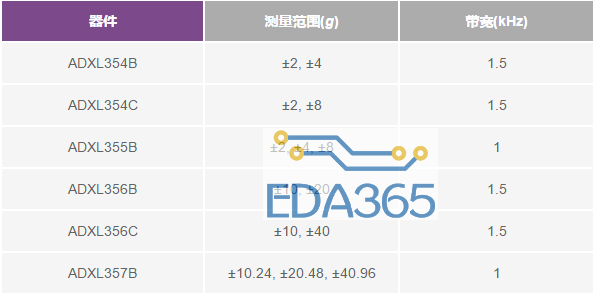
静态倾斜测量通常需要±1g 到±2g 的低 g 加速度计,带宽小于 1.5 kHz。模拟输出 ADXL354 和数字输出 ADXL355 均为低噪声密度(分别为 20 μg√Hz 和 25 μg√Hz)、低 0g 失调漂移、低功耗三轴加速度计,集成温度传感器,测量范围可选,如表 5 所示。
表 5. ADXL354/ADXL355/ADXL356/ADXL357 测量范围
ADXL354/ADXL355 和 ADXL356/ADXL357 采用密封封装,有助于实现出色的长期稳定性。性能提升与封装通常是正相关,如图 5 所示。封装常常被忽视,其实制造商可以利用封装来实现更好的稳定和漂移性能。这是 ADI 公司的一个重点关注方面,我们提供类型广泛的传感器封装以适应不同的应用领域。
高温和动态环境
在适合高温或恶劣环境的加速度计可用之前,一些设计人员曾不得不将标准温度 IC 用在远超出数据手册限值的情形中。这意味着最终用户须承担在高温下检验器件质量的责任和风险,成本高昂且颇费时间。密封封装能够耐受高温已是广为人知的事实,它通过一道能抵御湿气和污染的屏障来防止腐蚀。ADI 公司提供各类密封器件,这些器件具有增强的温度稳定性和性能。ADI 公司还大力研究了塑料封装在高温下的性能,尤其是引线框架和引脚适应高温焊接工艺的能力,使其在高冲击和振动环境中牢固可靠。因此,ADI 公司提供 18 款额定温度范围为−40°C 至+125°C 的加速度计,包括 ADXL206, ADXL354/ADXL355/ADXL356/ADXL357, ADXL1001/ADXL1002, ADIS16227/ADIS16228 和 ADIS16209。大部分竞争对手未提 供能在−40°C 至+125°C 温度范围内或恶劣环境条件下(例如重工业机械和井下钻探)工作的 MEMS 电容式加速度计。
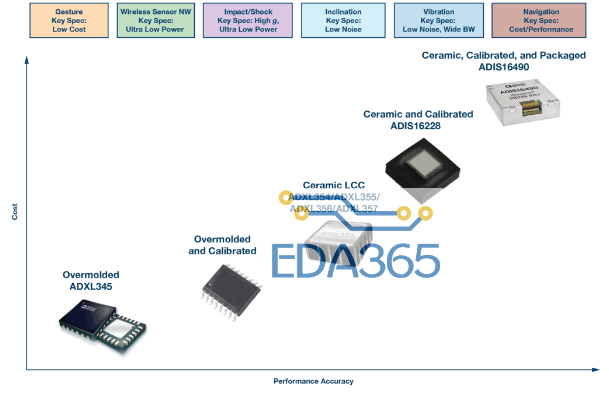
图 5. 高级封装技术和校准带来性能提升的示例
在温度超过 125°C 的恶劣环境中进行倾斜测量是极具挑战性的工作。ADXL206 是一款高精度(倾斜精度<0.06°)、低功耗、完整的双轴 MEMS 加速度计,适用于高温和恶劣环境,例如井下钻探。该器件采用 13 mm × 8 mm × 2 mm 侧面钎焊、陶瓷、双列直插式封装,支持−40°C 至+175°C 的环境温度范围,超过 175°C 时性能会下降,但 100%可恢复。
在有振动的动态环境中(例如农用设备或无人机)进行倾斜测量,需要 g 值范围较高的加速度计,比如 ADXL356/ADXL357。有限 g 值范围的加速度计测量可能会削波,导致输出失调增加。引起削波的原因可能是灵敏轴在 1 g 重力场中,或者是发生上升时间快但衰减慢的冲击。较高的 g 值范围可减少加速度计削波,从而降低失调,在动态应用中提供更好的倾斜精度。
图 6 所示为 ADXL356 Z 轴的 g 值范围有限的测量,此测量范围中已经存在 1g。图 7 所示为同一测量,但 g 值范围从±10 g 扩展到±40g。可以清楚看到,加速度计的 g 值范围扩展显著降低了削波引起的失调。
ADXL354/ADXL355 和 ADXL356/ADXL357 提供出色的振动校正、长期重复性和低噪声性能,而且尺寸很小,非常适合静态和动态环境中的倾斜检测应用。
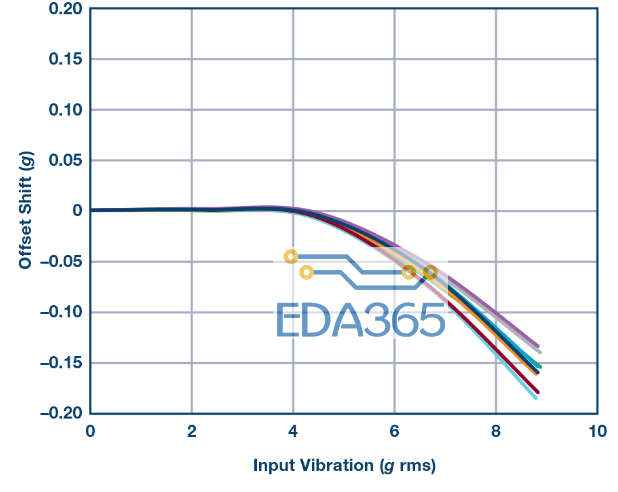
图 6. ADXL356 VRE,Z 轴相对于 1 g 的失调,±10 g 范围,Z 轴方向 = 1 g
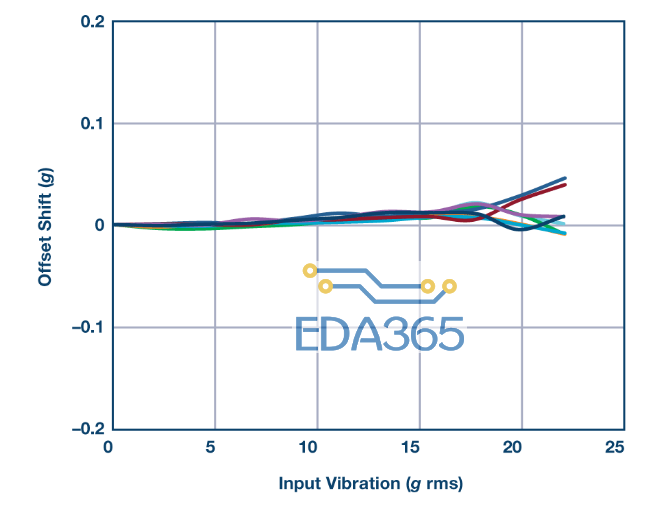
图 7. ADXL356 VRE,Z 轴相对于 1 g 的失调,±40 g 范围,Z 轴方向 = 1 g
稳定
主要标准:噪声密度、速度随机游走、运动中偏置稳定度、偏置重复性和带宽。
检测并了解运动可以给许多应用带来好处。掌控一个系统发生的运动,然后利用该信息提高性能(缩短响应时间、提高精度、加快运行速度),增强安全性或可靠性(系统在危险情况下关机),或者获得其他增值特性,是很有益的。由于运动的复杂性,有大量稳定性应用需要综合运用陀螺仪和加速度计(传感器融合,如图 8 所示),例如 UAV 监控设备和船上天线指向系统等。2
图 8. 6 自由度 IMU
6 自由度 IMU 使用多个传感器,以便弥补彼此的弱点。看起来像是一个或两个轴上的简单惯性运动,实际可能需要加速度计和陀螺仪传感器融合,目的是消除振动、重力和其他单凭加速度计或陀螺仪无法准确测量的影响因素。加速度计数据包括重力分量和运动加速度。二者无法区分,但可利用陀螺仪将重力分量从加速度计输出中去除。为了根据加速度确定位置,需要进行积分,在此过程之后,加速度计数据的重力分量引起的误差可能会快速变大。由于累积误差,仅凭陀螺仪不足以确定位置。陀螺仪不检测重力,因此可用作加速度计的辅助传感器。
在稳定性应用中,MEMS 传感器必须精确测量平台方位,特别是在运动时。图 9 是一个采用伺服电机校正角向运动的典型平台稳定系统的框图。反馈 / 伺服电机控制器将方向传感器数据转换为伺服电机的校正控制信号。
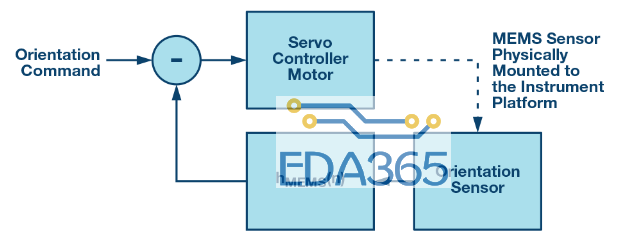
图 9. 基本平台稳定系统 3
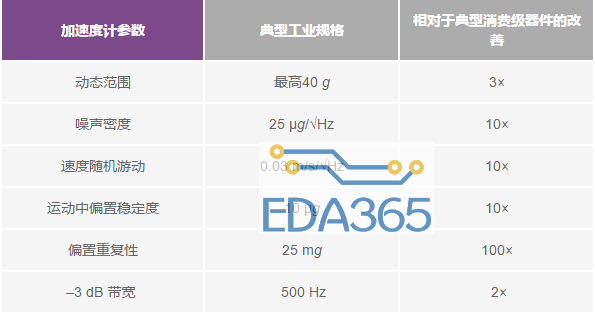
最终应用将决定所需的精度水平,而所选的传感器质量(消费级还是工业级)将决定其能否实现。区分消费级器件和工业级器件很重要,有时候二者的区别很微妙,可能需要仔细考虑。表 6 显示了消费级加速度计和 IMU 中集成的中档工业级加速度计的主要区别。
表 6. 工业 MEMS 器件对所有已知潜在误差源进行全面测定,精度水平比消费级器件高出一个数量级以上 2
在某些条件有利且可接受较低精度数据的情况下,使用低精度器件便可满足性能需要。然而,对能在动态环境中工作的传感器需求迅速增长,较低精度器件由于不能降低实际测量中的振动效应或温度效应而大受影响,很难达到小于 3°至 5°的指向精度。多数低端消费级器件未提供诸如振动校正、角度随机游走之类的参数规格,而这些规格在工业应用中恰恰可能是最大的误差源。
为了在动态环境中达到 1°甚至 0.1°的指向精度,设计人员的器件选择必须聚焦于传感器抑制温漂误差和振动影响的能力。传感器滤波和算法(传感器融合)虽然是提升性能的关键要素,但无法消除消费级与工业级传感器的差距。ADI 公司新型工业 IMU 的性能接近于上一代导弹制导系统所用的产品。诸如 ADIS1646x 和已宣布的 ADIS1647x 等器件以标准和迷你 IMU 外形尺寸提供精密运动检测,打进过去的特殊应用领域。
本文第二部分将继续探讨 MEMS 加速度计的重要工作特性,以及它们与可穿戴设备、状态监控、物联网、结构健康监控和资产健康监控等应用领域的关系。
参考电路
1. Long Pham and Anthony DeSimone. “MEMS 加速度计的振动校正” ADI 公司,2017 年。
2. Bob Scannell. “高性能惯性传感器助力运动物联网” ADI 公司,2017 年。
3. Mark Looney. “分析稳定系统中的惯性 MEMS 的频率响应” 《模拟对话》,第 46 卷,2012 年。








 热门文章
热门文章