APP下载
APP下载 登录
登录







基于CAN总线和双传感器的仿人机器人运动控制系统研究
发布时间:2020-07-09 嵌入式开发
嵌入式开发 DSP
DSP 75
75基于CAN总线的仿人机器人力信息检测系统
发布时间:2020-06-30小型仿人机器人的设计及步态规划
发布时间:2020-06-28基于PC/104与单片机的仿人机器人控制系统设计
发布时间:2020-06-24丰田公司发布第三代仿人机器人 T-HR3
发布时间:2020-06-23基于CAN总线的仿人机器人运动控制系统研究
发布时间:2020-06-20基于PC/104与单片机的仿人机器人控制系统设计
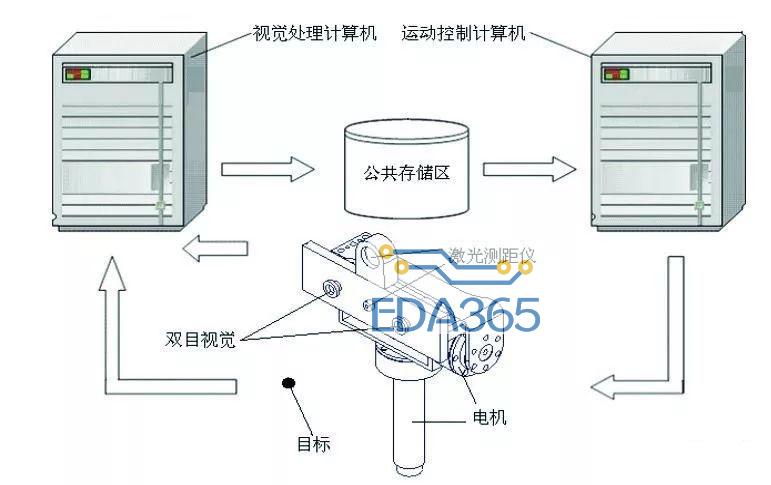
发布时间:2020-06-20基于双计算机的仿人机器人的视觉跟踪系统
发布时间:2020-06-19
 基于PC/104与单片机的仿人机器人控制系统设计
基于PC/104与单片机的仿人机器人控制系统设计